7.1.1. Ethernet adapters Overview¶
7.1.1.1. General information¶

Outward appearance of 8SMC4-USB-Eth1 adapter
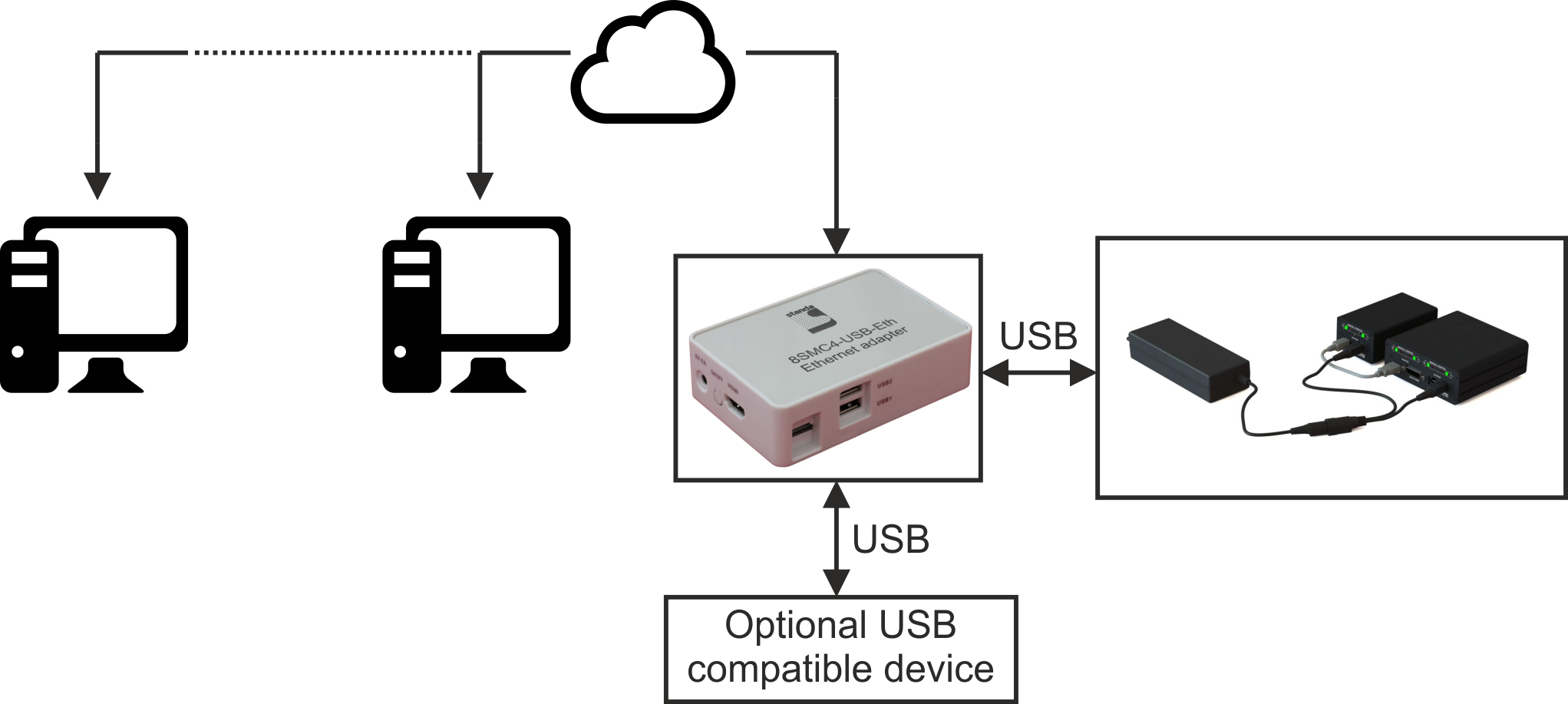
8SMC4-USB-Eth1 [1] is a universal device based on Cubieboard2 single-board computer with OS Linux inside, which enables the end user to interact with motor controllers remotely via various Ethernet-oriented interfaces. This device is also intended to be a universal provider for different services related to controllers’ popular usage scenarios (e.g. motion control). It means that if there is a standalone program which could be effectively used in conjunction with our controllers, chances are high that this adapter already has it preconfigured and all you need is to plug some controllers and connect Ethernet cable to it. Out-of-the-box 8SMC4-USB-Eth1 supports online web-camera streaming, LAN auto-discovery system and two interfaces to configure and control motor controllers:
Moreover 8SMC4-USB-Eth1 is equipped with embedded web-based administration interface, which enables the end user to conveniently control the device and monitor its state.
The appearance of the system from different perspectives (all necessary connectors in current version are marked with bold):
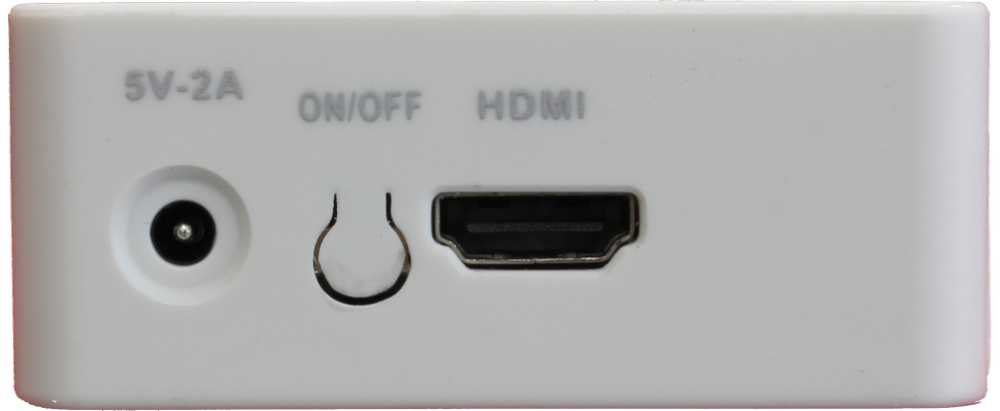
Front view. Left to right: power connector, on/off switch, HDMI connector
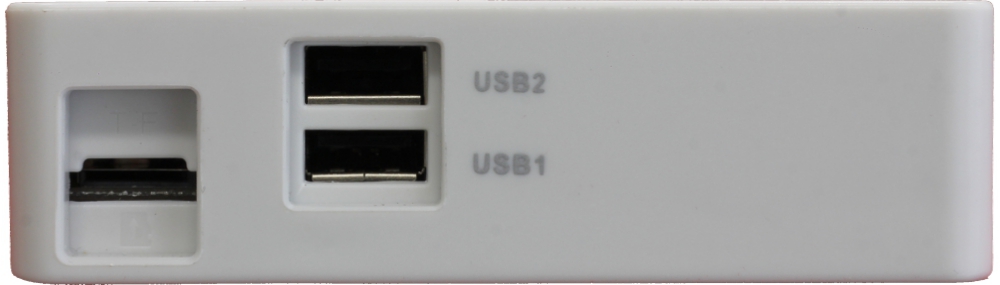
View from the right. Left to right: micro-SD card connector, two USB type A female connectors
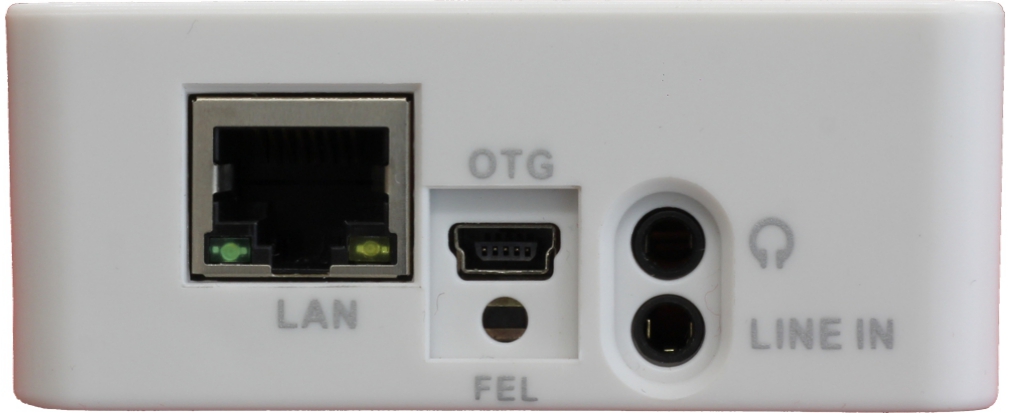
Back view. Left to right: Ethernet connector, mini-USB type B, switch to transfer into FEL mode, earphone and line in connectors
View from the left. IR receiver
Important
The work with the multi-axis controller of 8SMC4-ETHERNET/RS232-B19 via Ethernet does not differ from the work with an 8SMC4-USB-Eth1 adapter

Outward appearance multi-Axis Motion Controller of 8SMC4-ETHERNET/RS232-B19 (front view)

Outward appearance multi-Axis Motion Controller of 8SMC4-ETHERNET/RS232-B19 (rear view)
Industrial motion controller/driver 8SMC4-ETHERNET/RS232-B19 is designed especially to control up to 12 mechatronic systems based on standard DC, Servo or Stepper technologies. Controller/driver housing can be mounted in standard 19 inch industrial cabinets. Several boxes can be connected in a single network via Ethernet port. System can be automatically set on a peer-to-peer mode without any special infrastructure or master servers to operate. Also each axis could be controlled via separate RS232 port.
8SMC4-ETHERNET/RS232-B19 contains all necessary subsystems, including: control, power units and etc., which support the simultaneous work of all axes. Controller/driver can be connected to a number of PC-based workstations via Ethernet. All users have access to the range setting of the available axes and assignment of access privileges. From the programmer’s point of view, working with all axes of the system is very similar to working with a simple 8SMC4-USB box. The number of the axes available for a user and processed by the system can reach 50000. Front panel contains LED power and status indicators, manual buttons, system interlock button and Ethernet port. On the back panel there are motor connectors and separate RS232 ports for each axis, synchronization I/O connectors, a power connector and on/off button.The system is cooled through grille slots in upside and underside walls of the box.
7.1.1.2. Main requirements¶
7.1.1.2.1. Network configuration¶
Connecting the controller via a local network:
- You must have a DHCP server that supports an automatic distribution of ip addresses. The simple DHCP server that satisfies all requirements can be downloaded here.
- Server and your computer must support IPv4 protocol.
- Port 49150 should not be blocked. The cause of blocking can often be the presence of antivirus software, or program which monitors and filters network traffic (firewalls).
Warning
The Ethernet controller uses the multicast and UDP requests so make sure that such requests are enabled in your local network. The most common cause for the problem with the Ethernet controller detection is the blocking of such requests by Windows Firewall or managed network equipment.
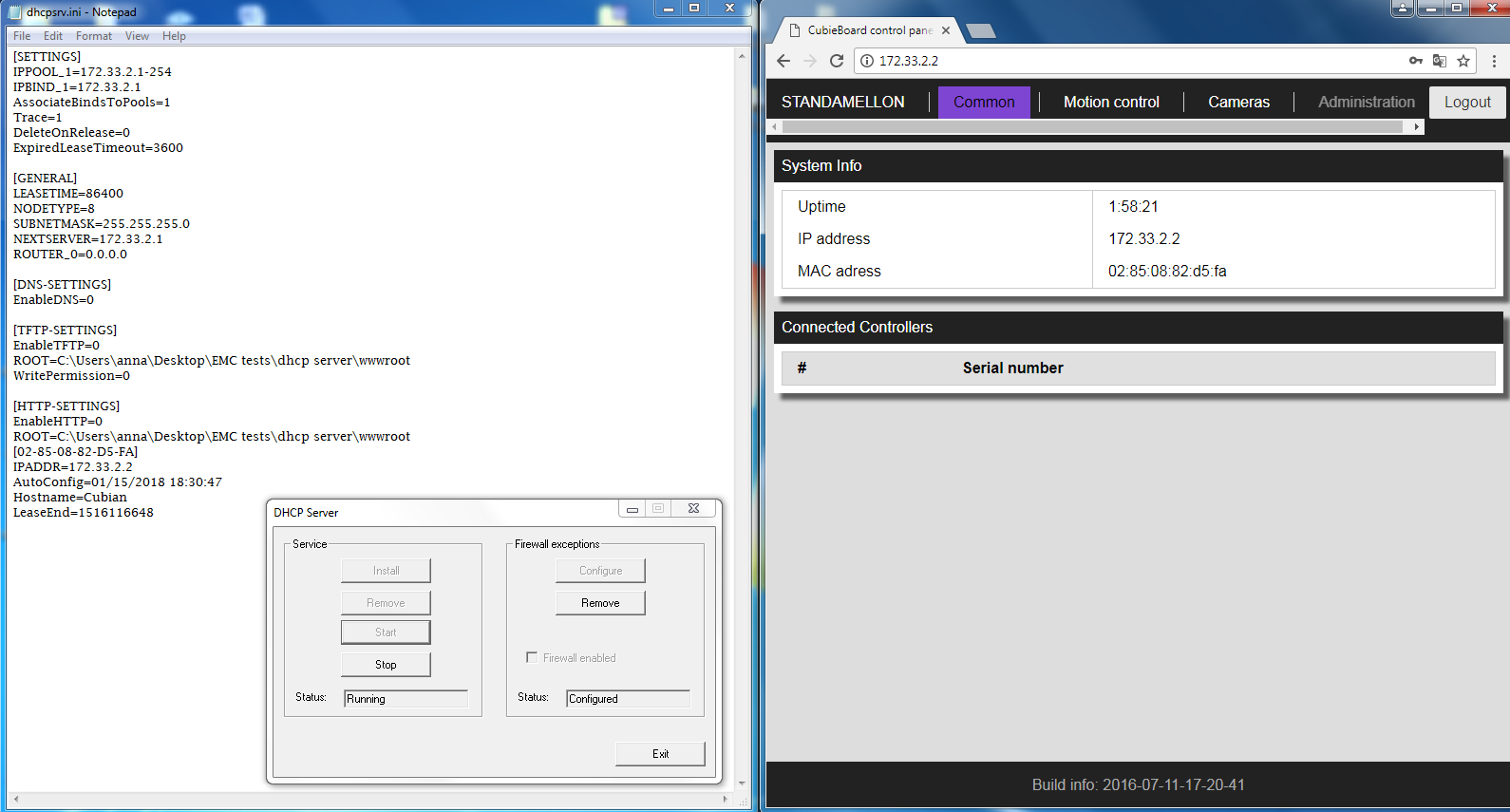
The Ethernet controller can also be used with the direct connection to the PC with working DHCP-server. The example of configuring the local connection for Windows OS:
- Download the simple DHCP server.
- Use the default config file for that server (lines 19 to 31 may be different) or configure the DHCP by yourself.
- Use revealer to find the given controller’s ip and open it in the web browser.
Note
If necessary, you can use a static IP address. You can download the manual and image with a static IP address here.