6.6. Community examples¶
Important
Below there are examples found on the open source Internet
The developer is responsible for executing the examples
6.6.1. Example of six-axis XiLab¶
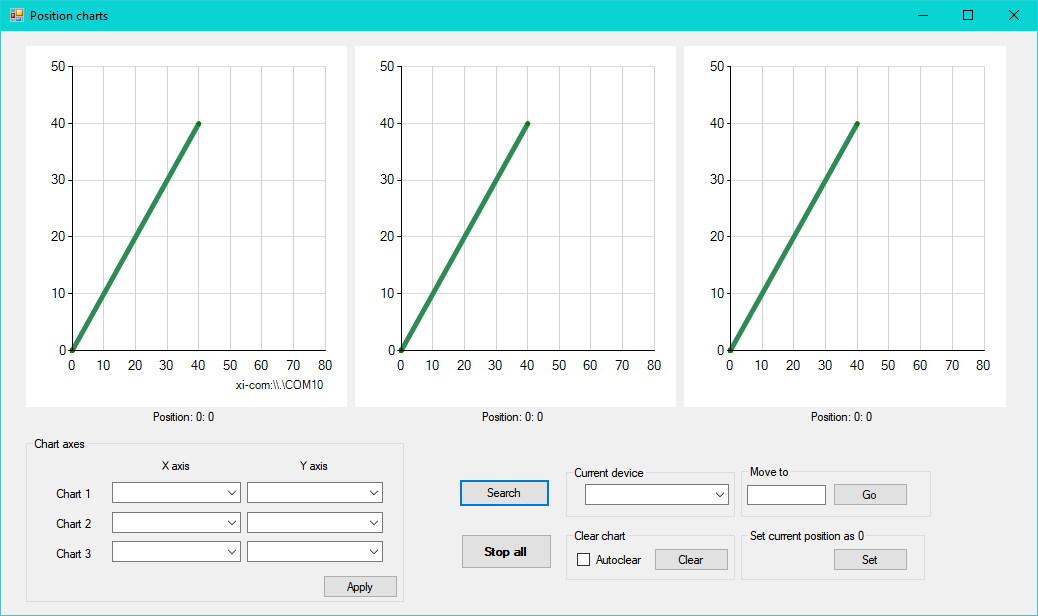
The program allows to operate with up to 6 devices in real time on 3 charts
The precompiled examples were build with Visual Studio 2013.
Example and guide posted on GitHub: https://github.com/sushchev/testwfa.
6.6.2. Examples for working with an attenuator for Python and LabView¶
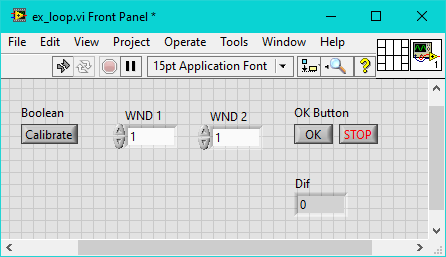
In this project several simple examples of using LibXIMC protocol with 8SMC4/5-USB controller were implemented. A rotating optical attenuator was used as a controlled device. Code samples were written on Python 3.4 and also in LabVIEW programming environment.
Example and guide posted on GitHub: https://github.com/Negrebetskiy/Attenuator.
6.6.3. Program for sending commands to XIMC controller from AVR controller¶
Important
Written in AtmelStudio7 for Atmel ATMEGA2560 16AU 1432 and used with XIMC controller and step motor ST5918L3008-B
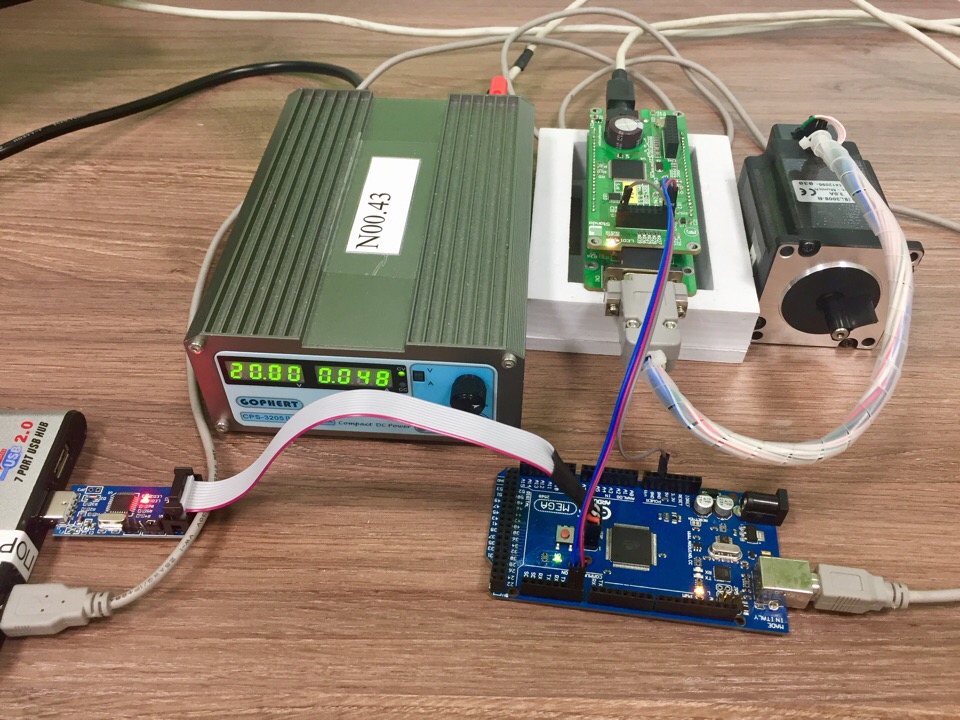
What does this program:
- Gets current position of the step motor.
- Moves it to the left for 3 seconds and stops the step motor.
- Moves it to the init position
Example and guide posted on GitHub: https://github.com/ntarabrina/XIMC_command.
6.6.4. The multi-axis interface in Python¶
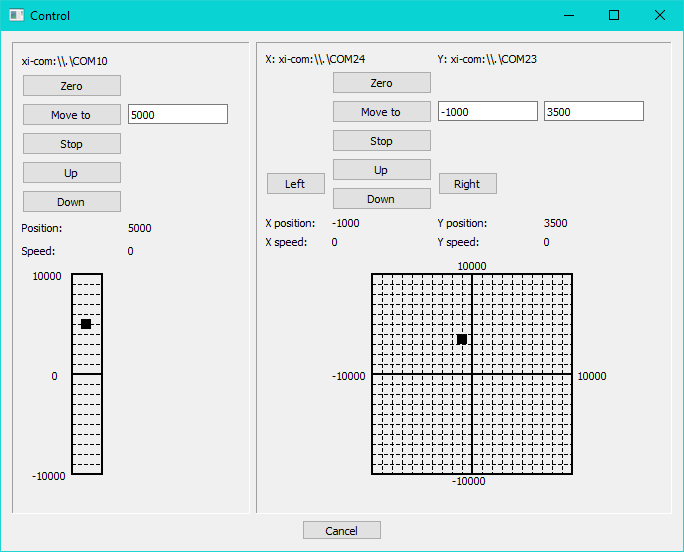
An example of a program with GUI, designed to work with multiple servo controllers (up to six inclusive, it is easy to increase this number if necessary) by means of XIMC protocol. GUI was created through PyQt5 package.
Example and guide posted on GitHub: https://github.com/Negrebetskiy/MultiAxleGUI.