4.1.1. Controller board¶
4.1.1.1. Dimensions and arrangement¶
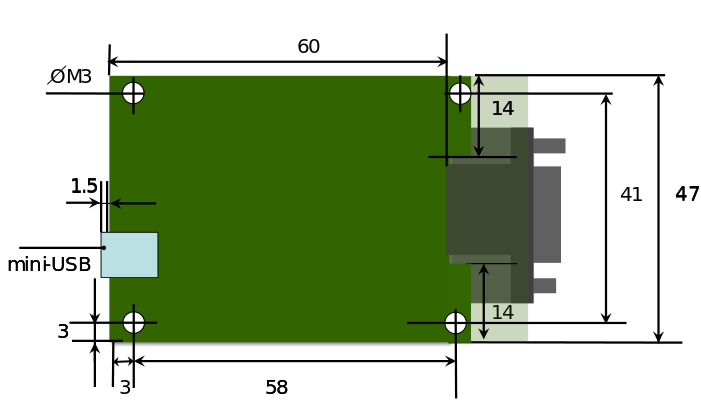
Structurally the controlled is designed as two boards, 47x75mm each, rigidly connected to each other. A logic controller and control systems are mounted at the bottom board, a power part is at the top board. A radiator at the power part is available.
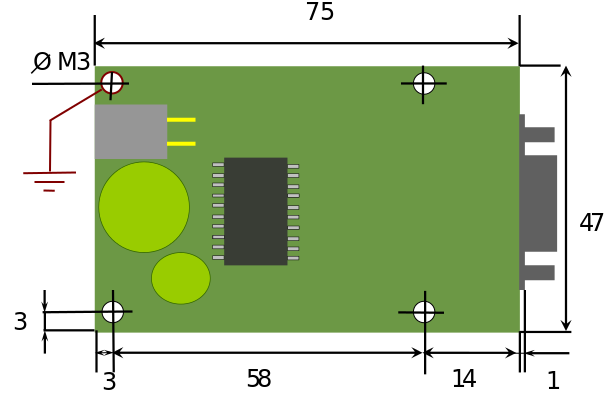
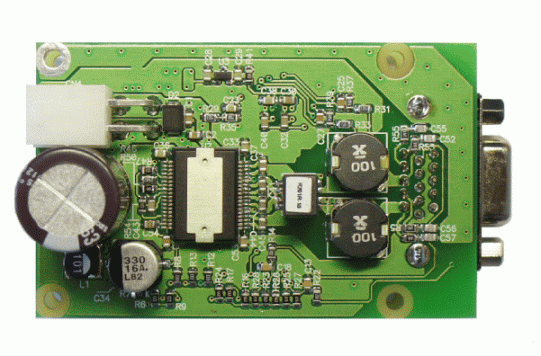
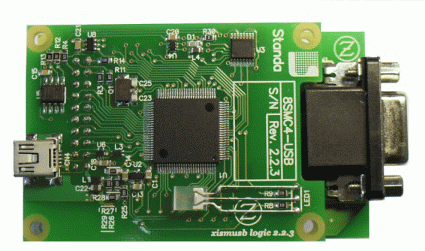
Top view on the controller. The view from power part and radiator side.
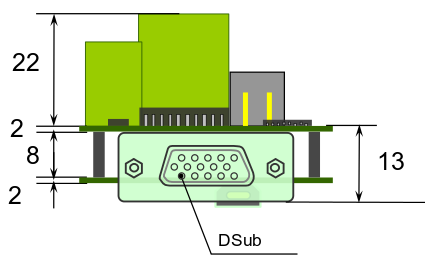
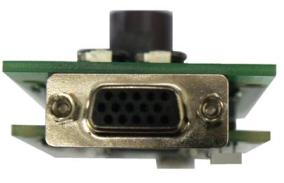
Front view on the controller. The view from stage cable side.

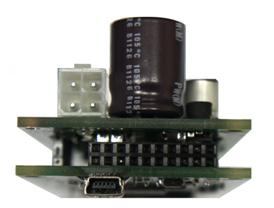
Rear view on the controller. The view from backplane connector side.
Bottom view on the controller. The view from micro USB port side.
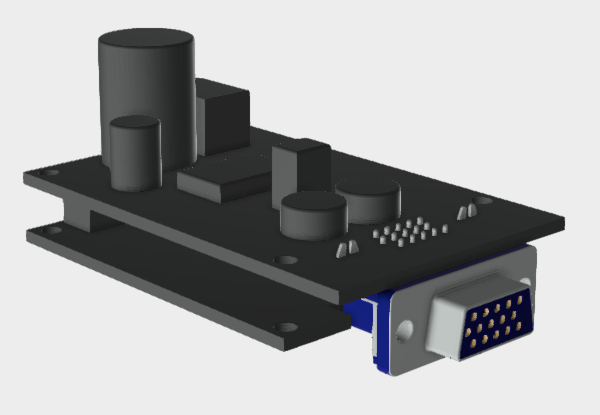
3D view controller.
Important
If you are mounting the radiator to the power part by yourself, please make sure that there is no contact between heat-conducting surfaces and conductive elements of the unit. Such contact may damage the power circuit! This warning is applicable only to controllers supplied without body.
4.1.1.2. Controller board connectors¶
4.1.1.2.1. Positioner connector¶
A female DSub 15-pin connector for positioner is mounted on the controller board.
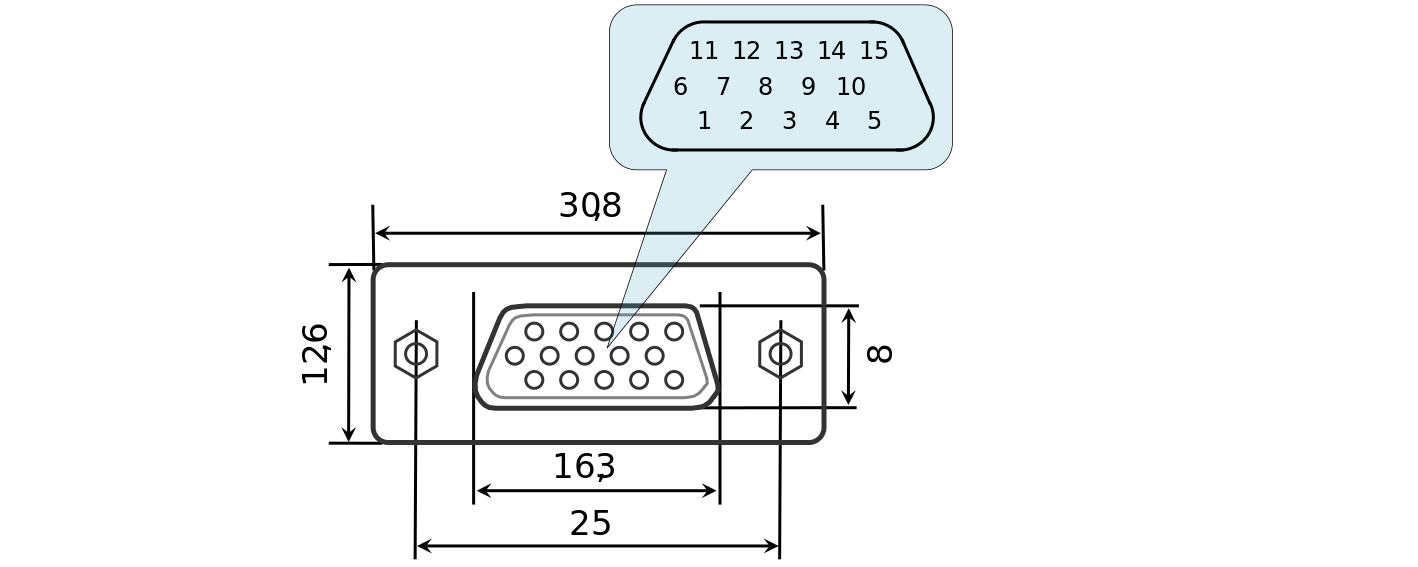
Dimensions and numbers of the pins in DSub connector (front view)
Pins functionality:
- Not phase B of SM or - DC of the motor
- Phase B of SM or + DC of the motor
- Not phase A of SM or - DC of the motor
- Phase A of SM or + DC of the motor
- 5V / up to 100mA stabilized output for encoder power supply
- One-wire interface for positioner identification (for Standa hardware only)
- Logic ground for limit switches, encoder, etc.
- 2nd limit switch
- 1st limit switch
- Encoder channel A
- Encoder channel B
- Revolution sensor input
- NC for 8SMC4
- NC for 8SMC4
- NC for 8SMC4
Note
Outputs 1 & 3 and 2 & 4 must be connected together for proper DC motor function if the nominal current of the motor is higher than 3A.
Warning
Plugging in/out the motor to the controller is not recommended while motor windings are under voltage.
4.1.1.2.2. Power supply connector at the board¶
A male 4-pin Mini-Fit connector with 4.2mm interval (type MF-4MRA) is mounted at the controller board for plugging in to power supply. Its comparable benefits are as following: high 8A current per pin, a fixation available, a possible coupling with both cable-mounted (type MF-4F, PN 39-01-2040 according to Molex catalogue) and board-mounted counterparts, including vertical (PN 15-24-7041 according to Molex catalogue). All Mini-Fit connectors are available in Molex catalogue at www.molex.com.
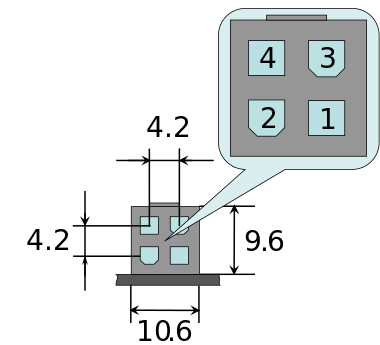
Dimensions and numbers of the pins in PSC (Power Supply Connector), front view
Pins functionality:
- “-” power electrode.
- 12–36V “+” power electrode.
- “-” power electrode.
- 12–36V “+” power electrode.
Important
Never supply the power to the controller and do not plug it to power connector if you are not confident that your power supply parameters conform to the requirements. Never attempt to plug the power supply to the controller if you are not sure power supply unit and controller connectors are compatible! The acceptable connection parameters are described in Safety instructions.
Important
Hot-swapping or unreliable connection of the power supply connector MF-4MRA may damage the PC and/or the controller. For more details please refer to Safety instructions.
4.1.1.2.3. Data connector¶
A mini USB port is mounted at the controller board. It is intended for operating the controller using PC and for power supply in single-axis configuration. While developing the multiaxis systems, a backplane connector is used instead of mini USB port. The controller port supports a full-speed mode and USB 2.0 specification. Depending on the computer OS device driver installation may be required. For more details please refer to Quick start guide and http://files.xisupport.com/Software.en.html#.

USB-to-mini-USB cable

Type B mini-USB connector
| Pin # | Name | Wire colour | Description |
|---|---|---|---|
| 1 | VCC | Red | +5V DC |
| 2 | D- | White | Data - |
| 3 | D+ | Green | Data + |
| X | ID | N/C | |
| 4 | GND | Black | Ground |
Warning
Use verified USB cables only! Damaged or low-quality USB cable may cause improper controller operation, including motor rotation errors and errors of device recognition by PC operating system. Short cables with thick wires and screening are ideal for sustainable connection.
4.1.1.2.4. Backplane connector¶
A female 20-pin double-row connector (PBD-20R) with 2.54mm pitch is mounted on the controller board for backplane connection.
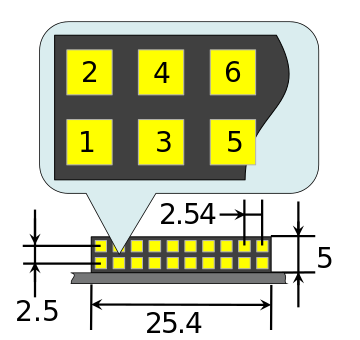
Dimensions and output pins numbers in BPC (BackPlane Connector), connector-side view
Pin function:
- GND, duplicates the corresponding pin of mini USB
- VBUS, duplicates the corresponding pin of mini USB connector.
- D-, duplicates the corresponding pin of mini USB connector.
- D+, duplicates the corresponding pin of mini USB connector.
- Joy, an analog 0-3 V input used for external joystick connection.
- Pot, an analog 0-3 V input used for general purpose.
- RX, a serial port input, 3.3V logic.
- TX, a serial port output, 3.3V logic.
- CLK, a Clock signal for external driver control, 3.3V logic.
- DIR, a Direction signal for external driver control, 3.3V logic.
- BUT_R, an external “Right” button input.
- BUT_L, an external “Left” button input.
- ExtGPIO, a common input/output (or an Enable signal if an external driver is used), 3.3V logic.
- An output for magnetic brake control, 3.3V logic.
- Synchronization output, 3.3V logic.
- Synchronization input, 3.3V logic.
- A LED Power output displaying 3.3V power supply for controller.
- A LED Status output displaying controller’s operating mode.
- A LED output for left limit switch.
- A LED output for right limit switch.
Note
No additional connection or pull-up to ground/power supply is required for idle pins. Just don’t use them.
Important
A maximum designed operating voltage for Joy and Pot analog inputs is UP TO 3V. Never supply these inputs with higher voltage, including 3.3V value, otherwise the proper operation of all the analog channels of the controller may get disrupted and the controller itself or the motor may get damaged.
Important
The outputs available at the internal connector are not protected. Mounting of any additional buffers or filtering chains is a total responsibility of user or developer who designs a backplane intended to use these lines.
Important
While the controller is unpowered, no voltage over 0.3V relative to the DGND pin is allowed on the internal connector. Provision of any additional protection preventing those accidents (if possible) is a total responsibility of user or developer who designs a backplane intended to use these lines.