2. Техника безопасности¶
2.1. Требования к блоку питания и заземлению. Подключение контроллера¶
Ниже перечислены основные требования к блоку питания для работы как с платой контроллера, так и с контроллерами в корпусе (одноосная и двухосная системы). Многоосная система имеет свои требования по питанию и технике безопасности.
Во время работы, потребление тока будет зависеть от того, как используется контроллер. Наши контроллеры откалиброваны по номинальному току двигателей, с которыми они будут использоваться. Благодаря широтно-импульсной модуляции (ШИМ) наши контроллеры обычно потребляют меньше тока, чем номинальный ток двигателей. Однако во избежание проблем в наихудших сценариях мы рекомендуем выбирать источник питания с максимальным током не менее номинального тока двигателей, которые будут подключены к контроллеру. В случае многоосевых контроллеров вам нужно будет суммировать ток всех контроллеров, подключенных к источнику питания.
Наши контроллеры требуют напряжения 12В-48В.
Рекомендуемые параметры питания: 24 В; 2.5A
Важно
Блок питания должен быть заземлен через розетку 220В (трехпроводная схема подключения). Убедитесь, что используемый вами блок питания имеет заземленный минусовой выход. Если вы используете блок питания с отвязанным от земли минусовым проводом, заземляйте контроллер через клемму заземления, которая находится на плате контроллера!
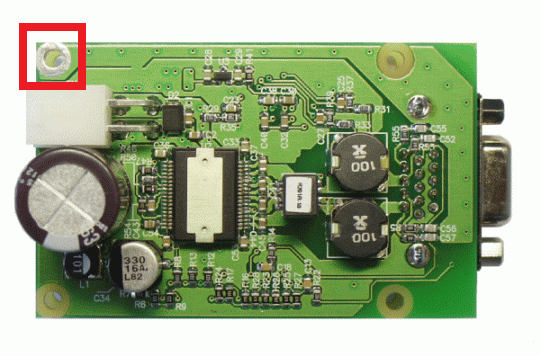
Внешний вид платы контроллера сверху. Красным квадратом отмечена клемма заземления
Типовые схемы подключения контроллера (как коробочных версий, так и платы без корпуса):
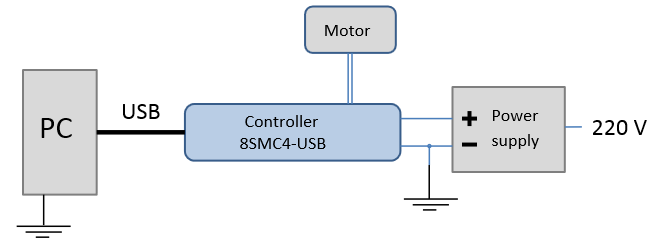
Схема подключения контроллера с заземлением через минусовый провод блока питания
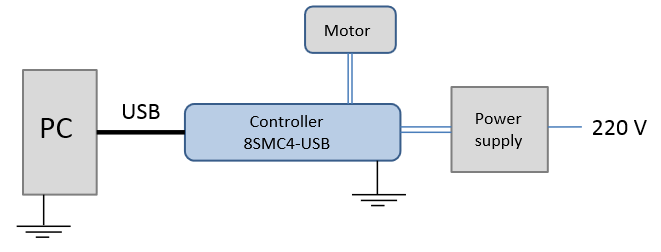
Схема подключения контроллера с заземлением через клемму заземления
Предупреждение
Блок питания должен обеспечивать необходимый ток для вращения двигателя. Абсолютным минимумом является ток, рассчитываемый по формуле
где \(I_{power.min}\) это минимальный рабочий ток блока питания, \(I_{motor}\) это рабочий ток через обмотку двигателя, \(U_{power}\) это стабилизируемое напряжение блока питания, а \(U_{motor}\) это номинальное рабочее напряжение мотора. Рекомендуется использовать блок питания с рабочим током \(I_{power} \geq 2*I_{power.min}\). Напряжение \(U_{power}\) должно быть выше \(U_{motor}\). Чем выше напряжение питания, тем большей скорости вращения можно достичь.
Можно использовать параметр мощности блока питания вместо рабочего тока. Абсолютным минимумом мощности блока питания будет
Например, для мотора с рабочим током в обмотке 1А и рабочим напряжением 5В (номинальная мощность 5Вт), рабочее напряжение блока питания можно взять 20В с выдаваемой мощностью не менее 10Вт (максимальный рабочий ток блока питания не менее 0.5 А).
2.2. Плата контроллера¶
Важно
При работе с платой контроллера запрещено трогать плату руками, т.к. статический разряд может повредить компоненты на ней. Рекомендуется пользоваться антистатическими браслетами.
Важно
При работе с платой контроллера категорически запрещено подключать плюс силового источника питания к контроллеру при не подключенном общем проводе источника питания или подключать/отключать кабель силового питания на горячую в случае, когда источник питания находится под напряжением, контроллер подключен к компьютеру, источник питания и компьютер заземлен. Это может привести к выходу из строя компьютера! Данное требование является общим для любых электронных устройств с собственным электропитанием, подключенным к компьютеру по интерфейсу USB.
Предупреждение
Рекомендуется сначала подключить плату контроллера к силовому электропитанию с заземлением, либо отдельно заземлить плату с помощью специально маркированной клеммы (см. пункт выше), прежде чем подключать контроллер к мотору или к компьютеру по интерфейсу USB.
2.3. Одноосная и двухосная система в корпусе¶
Важно
При работе с контроллером в корпусе (одноосная или двухосная системы) запрещено превышать максимальное напряжение питания, равное 36В, превышение этого значения более чем на 2В может немедленно привести к выходу системы из строя.
2.4. Многоосная система¶
Основная особенность подключения многоосной системы состоит в том, что ей требуется 220В. Вышеперечисленные требования к блоку питания и заземлению к данной системе не относятся.

Общая схема подключения многоосной системы
Важно
Многосная система использует трёхпроводную схему подключения 220В (фаза, нуль, земля) с заземлением через розетку на корпус. Несоблюдение этого условия может ухудшить функционирование системы и понизить её устойчивость к помехам.
Важно
При откручивании модуля , запрещается залезать руками внутрь корпуса коробки. Внутри 220В!
Примечание
Многоосная система поддерживает горячее подключение/отключение модулей и внезапное отключение питания 220В.