4.1.4. Многоосная система¶
4.1.4.1. Корпус¶
Многоосная версия контроллера представляет собой 7U конструктив для установки в 19» стойку, содержащий до 36 плат контроллеров, объединённых в модули по 4. Размеры корпуса: 448 x 375 x 312 мм.

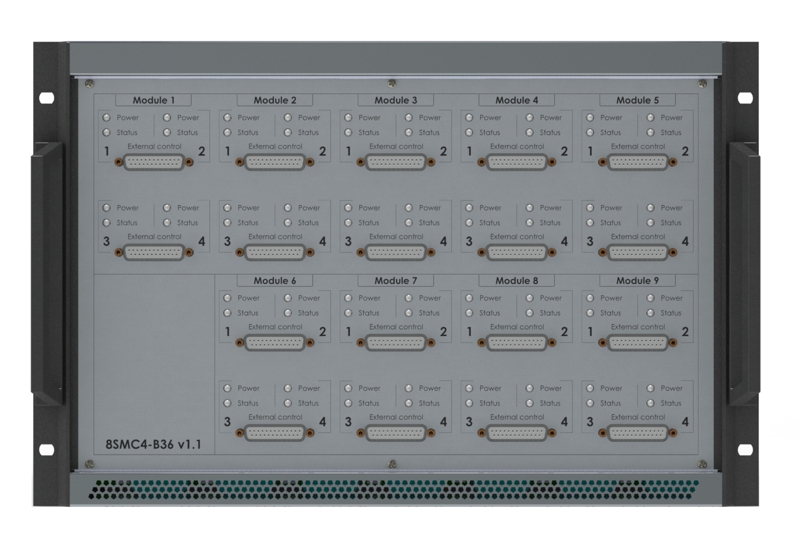
Передняя панель разделена на 9 частей с надписями «Module 1», «Module 2»,… «Module 9». В рамках каждого модуля вынесены сигналы индикации (power, status) для каждой оси, а также дополнительный разъём «External control».
На задней панели распололжен разъём 220В, Ethernet гнездо, кнопка включения/выключения питания и по 4 разъема подключения позиционера для каждого модуля. Всего может быть до 36 таких разъёмов.

Каждый модуль можно вынимать и вставлять во время работы системы. Для того, чтобы вытащить модуль, необходимо открутить винты с рифлёными головками (3 шт) и потянуть за ручку.
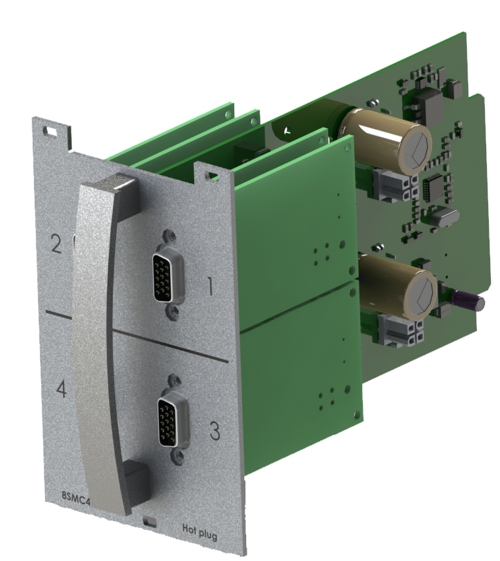
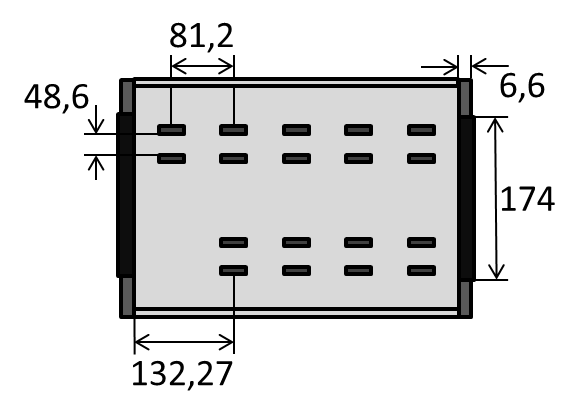
Схематичный вид модуля
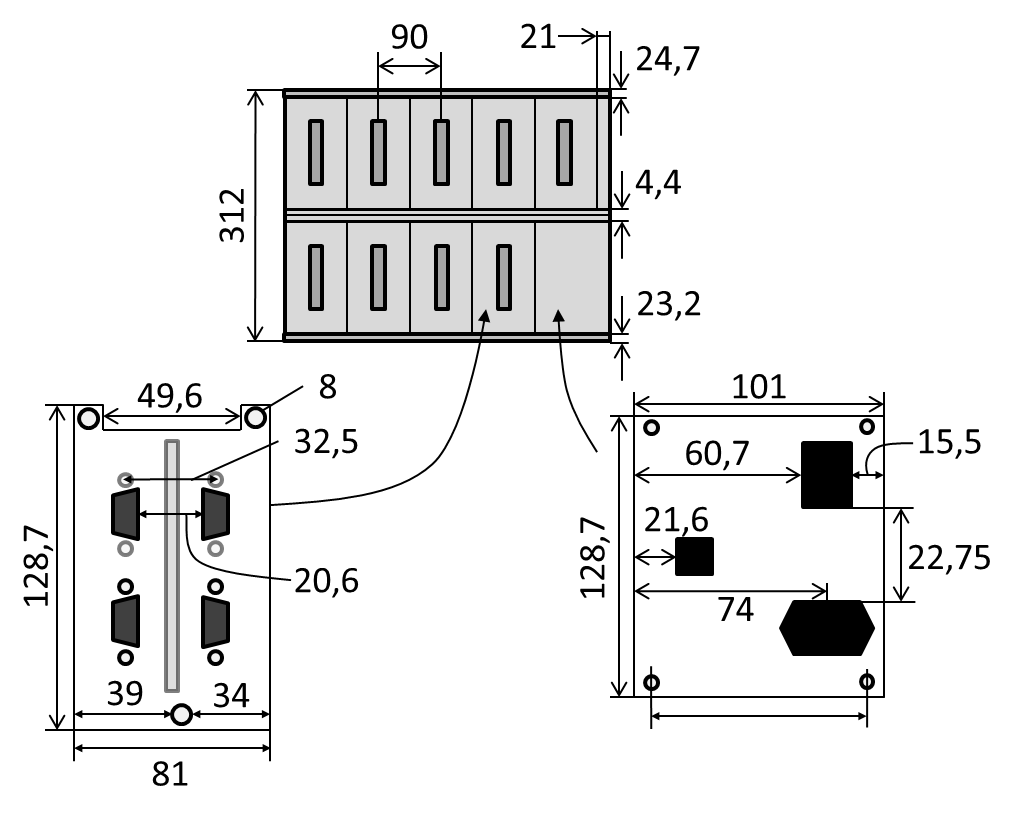
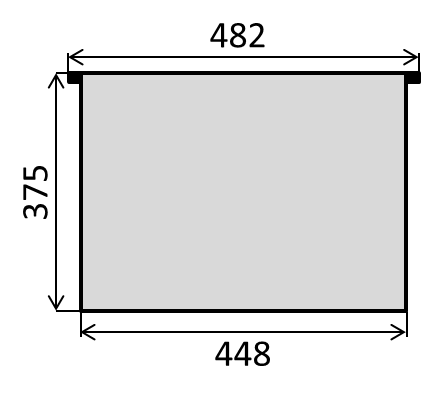
4.1.4.2. Геометрические размеры¶
Многоосная версия контроллера представляет собой 7U конструктив для установки в 19» стойку, содержащий до 36 плат контроллеров, объединённых в модули по 4. Размеры корпуса: 448 x 375 x 312 мм.
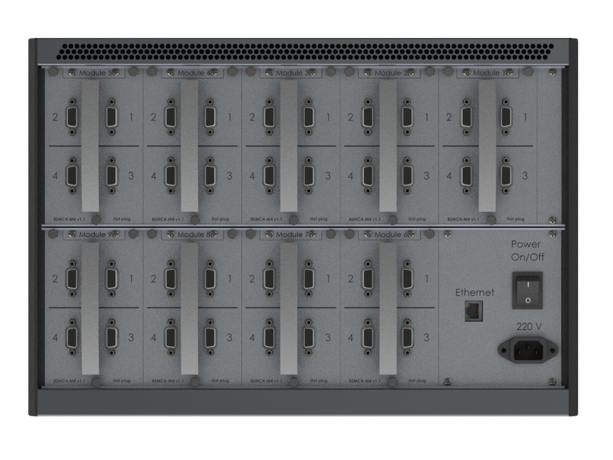
Многоосная система. Вид сзади. Со стороны силового разъёма 220В и модулей с контроллерами.
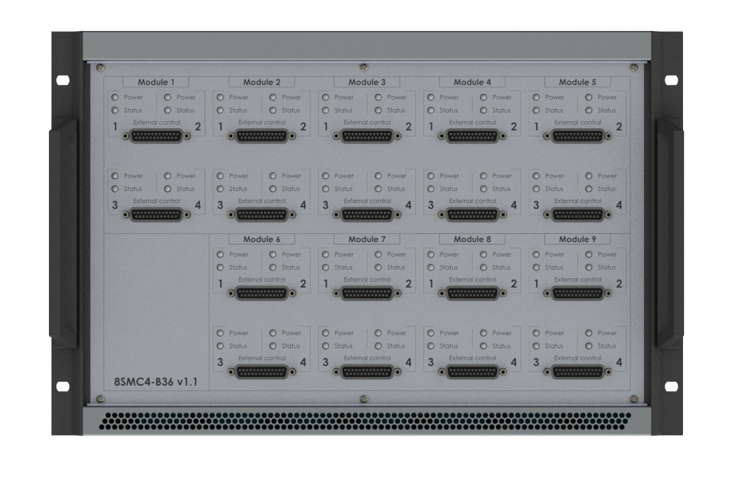
Многоосная система. Вид спереди. Со стороны передних разъёмов.
Многоосная система. Вид сверху.

Многоосная система. Вид сбоку.
4.1.4.3. Разъёмы¶
4.1.4.3.1. Разъем подключения позиционера¶
Для подключения позиционера используется разъем DSub 15 типа «мама».
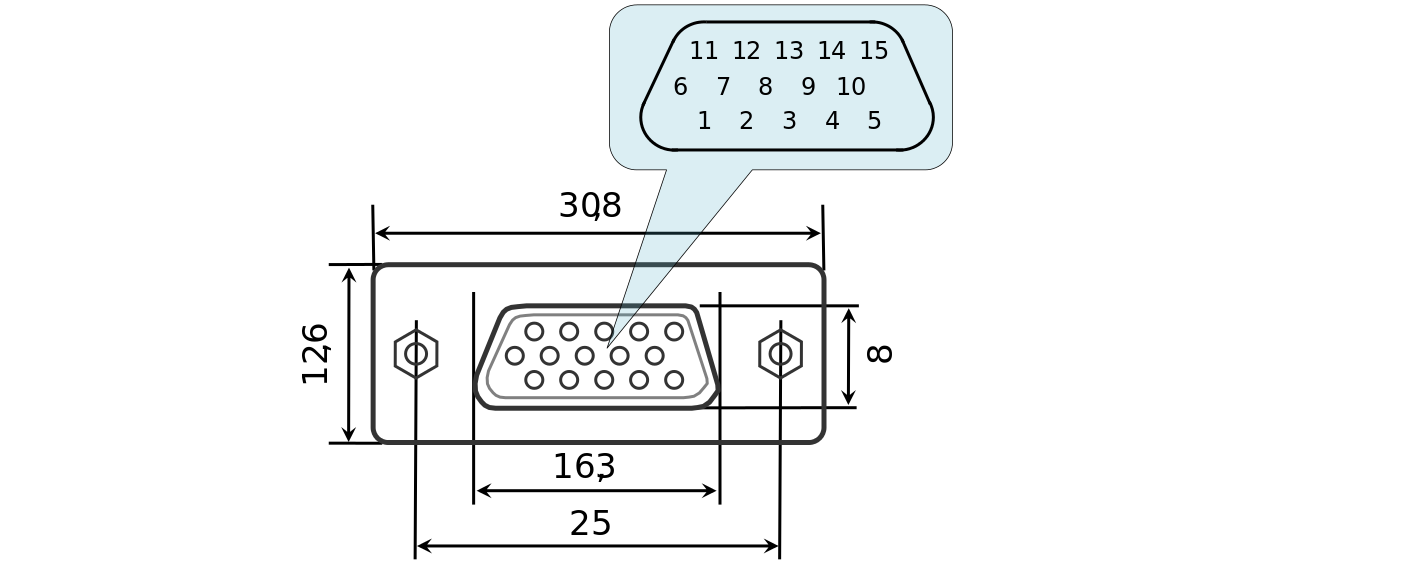
Размеры и нумерация выводов в разъеме DSub, вид спереди
Назначение выводов:
- ШД фаза не В или - DC-мотора
- ШД фаза В или + DC-мотора
- ШД фаза не А или - DC-мотора
- ШД фаза А или + DC-мотора
- Выход 5В, до 100 мА, стабилизированное для питания энкодера
- Однопроводной интерфейс опознавания подвижки (работает только с позиционерами Standa)
- Земля логическая для концевиков, энкодера и прочего
- Концевик №2
- Концевик №1
- Энкодер А
- Энкодер В
- Вход датчика оборотов
- Не подключены
- Не подключены
- Не подключены
Примечание
Для подключения DC мотора с рабочим током выше 3А нужно соединить выходы 1 и 3, а также выходы 2 и 4.
Предупреждение
Не рекомендуется присоединять к/отсоединять от контроллера двигатель пока есть питание на обмотках мотора.
4.1.4.3.2. Разъем силового питания для многоосных систем¶
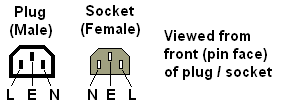
Многоосной система работает от сети питания 220 В и использует разъём IEC.

Назначение выводов:
| N | «ноль» |
| E | «земля» |
| L | «фаза» |
4.1.4.3.3. Разъём управления многоосной системой¶
Многоосная система позволяет одновременно контролировать до 36 осей через Ethernet. Используется стандартный RJ45 коннектор типа «мама»:

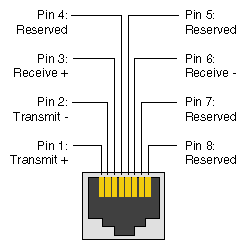
Назначение выводов
4.1.4.3.4. Дополнительный разъём многоосных систем¶
Данный разъём находится на передней панели многоосной системы и называется External control. Всего таких разъёмов 18. Они служат для управления двигателями внешними средствами контроля, такими, как джойстик, кнопки, а также на них выведена индикация питания и концевиков двигателей.
Внешний вид передней панели
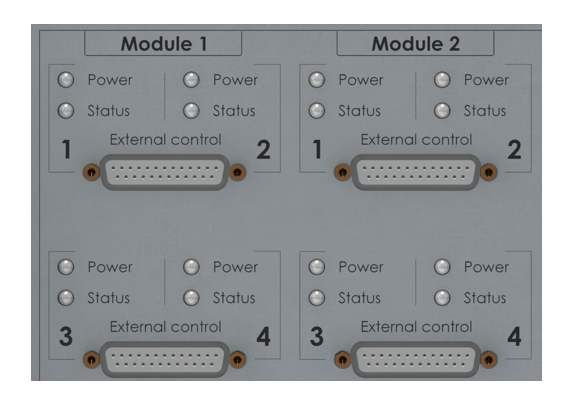
Приближённый вид первых двух модулей

Внешний вид и нумерация выводов разъёма DB-25 (вид спереди)
Назначение выводов:
- PWRLED1, индикатор наличия питания контроллера 1
- LEFTEDGE1, индикатор левого концевика контроллера 1
- BUT_L_1, вход левой кнопки контроллера 1
- JOY1, вход джойстика контроллера 1
- NC, не подключен
- +5VP, выход 5В
- SYNCOUT, выход синхронизации модуля
- GND, земля
- NC - не подключен
- JOY2, вход джойстика контроллера 2
- BUT_L_2, вход левой кнопки контроллера 2
- LEFTEDGE2, индикатор левого концевика контроллера 2
- PWRLED2, индикатор наличия питания контроллера 2
- STS1, индикатор состояния контроллера 1
- RIGHTEDGE1, индикатор левого концевика контроллера 1
- BUT_R_1, правая кнопка контроллера 1
- NC, не подключен
- NC, не подключен
- SYNCIN, вход синхронизации модуля
- +3V, выход +3В
- NC, не подключен
- NC, не подключен
- BUT_R_2, правая кнопка контроллера 2
- RIGHTEDGE2, индикатор левого концевика контроллера 2
- STS2, индикатор состояния контроллера 2
Примечание
Выход синхронизации устанавлиается в единицу, если выходы всех синхронизации всех 4х контроллеров модуля и вход синхронизации установлены в единицу.
Примечание
Если вход синхронизации не подключен, то он подтягивается к единице встроенной подтяжкой.