7.1.1. Обзор Ethernet адаптера¶
Примечание
Адаптер 8SMC4-USB-Eth был переименован в 8Eth1 [1]. Все имеющиеся инструкции в нашей документации актуальны и применимы к обоим устройствам.
7.1.1.1. Общая информация и внешний вид¶

Внешний вид адаптера 8Eth1
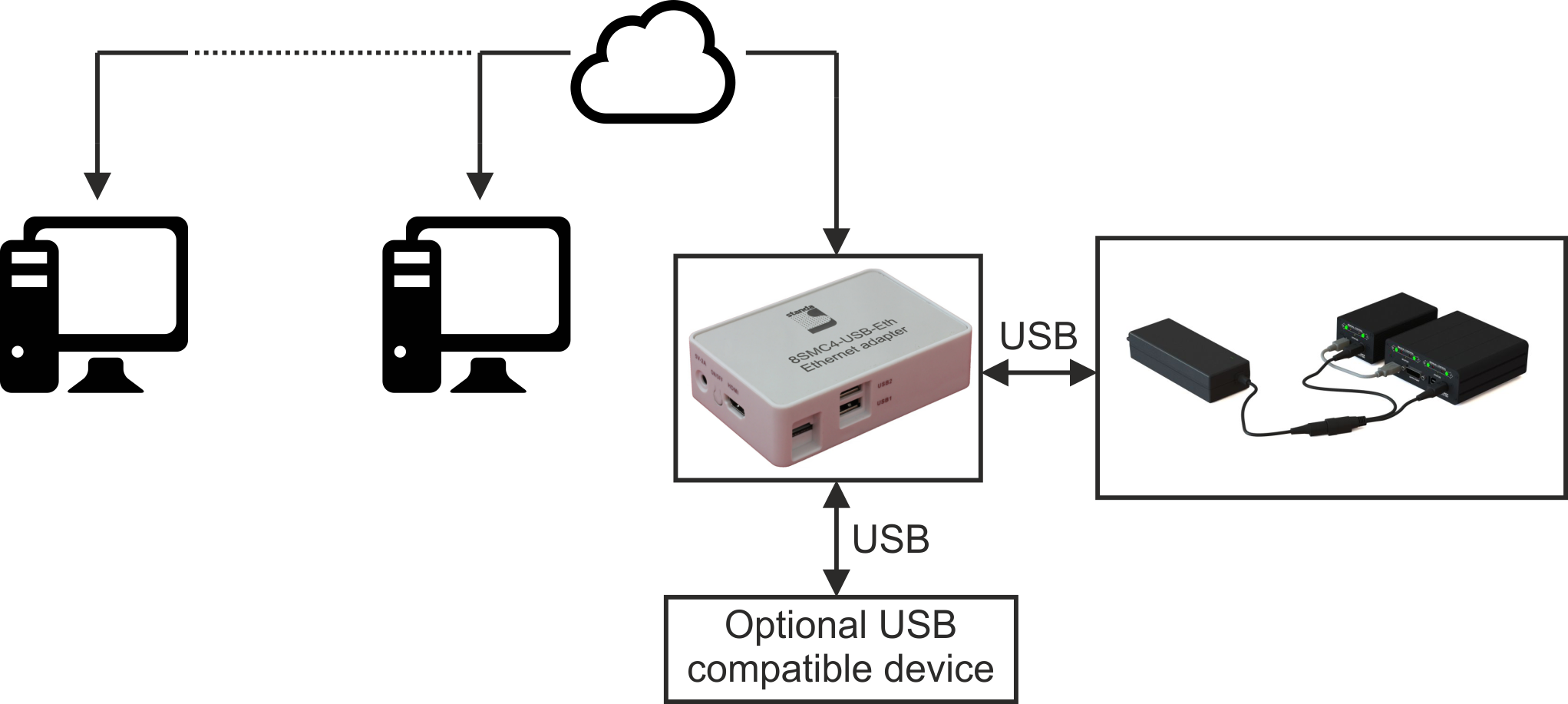
8Eth1 [1] - это универсальное устройство, основанное на одноплатном компьютере Cubieboard2 под управлением ОС Linux, основной задачей которого является предоставление доступа к контроллерам моторов через различные Ethernet-ориентированные интерфейсы. Помимо этого, 8Eth1 представляет собой агрегатор сервисов, связанных с наиболее широко распространенными областями применения контроллеров. Так, например, в комплектации по умолчанию устройство оснащено сервисом сетевой трансляции с подключенных web-камер, системой автоматического обнаружения в LAN, а также несколькими интерфейсами для удаленной работы с контроллерами:
Помимо этого 8Eth1 также имеет встроенный веб-интерфейс администрирования, который позволяет с лёгкостью управлять устройством и следить за его состоянием.
Внешний вид системы с разных ракурсов (жирным отмечены разъёмы, используемые в текущей версии устройства):

Вид адаптера спереди. Слева направо: разъём питания, кнопка включения питания, разъём HDMI
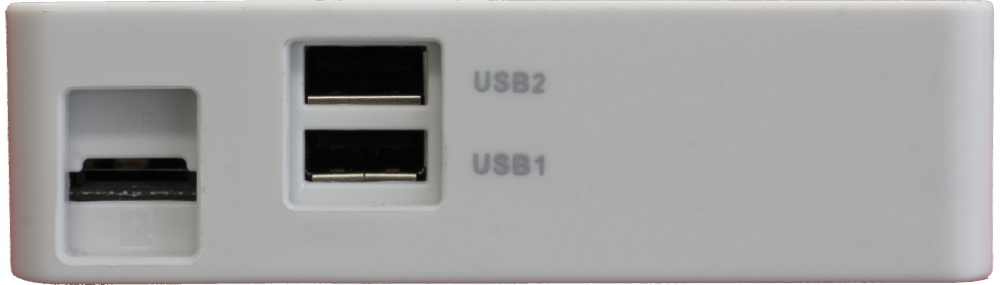
Вид адаптера справа. Слева направо: разъём для микро-SD карты, два разъёма USB type A
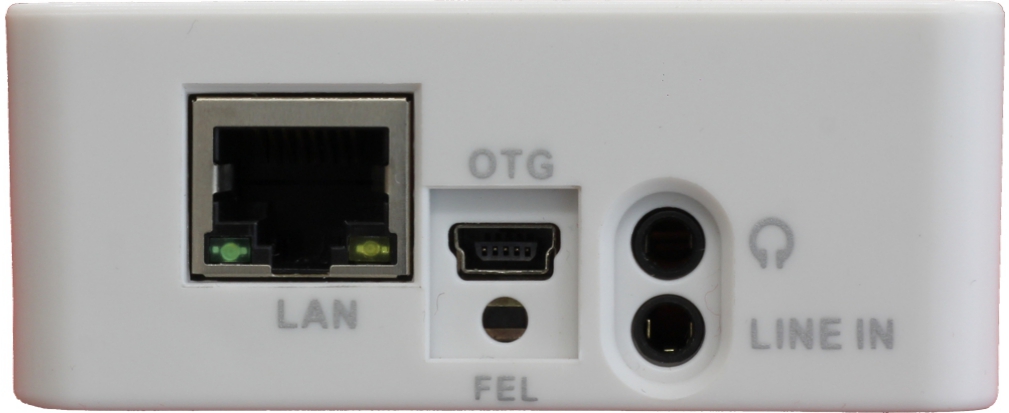
Вид адаптера сзади. Слева направо: Ethernet разъём, mini-USB типа B, кнопка перехода в режим FEL, аналоговые вход/выход для микрофона и наушников
Вид адаптера слева. Отверстие с ИК приёмником
Используя USB хабы , вы можете подключить к этому Ethernet-адаптеру до 36 контроллеров.
Важно
Лучше использовать древовидную структуру, для подключения через USB. Чем меньше USB хабов вы используете, тем лучше.
Работа с многоосным контроллером 8SMC5-ETHERNET/RS232-B19 через Ethernet не отличается от работы с 8Eth1

Внешний вид многоосного контроллера движения 8SMC5-ETHERNET/RS232-B19 (вид спереди)

Внешний вид многоосного контроллера движения 8SMC5-ETHERNET/RS232-B19 (вид сзади)
Контроллер 8SMC4-ETHERNET/RS232-B19 разработан специально для управления до 12 мехатронными системами на основе стандартных технологий постоянного тока, сервопривода или шаговой технологии. Корпус контроллера может быть установлен в стандартные 19-ти дюймовые промышленные шкафы. Несколько корпусов могут быть подключены в одну сеть через порт Ethernet. система может быть автоматически установлена в одноранговым режиме без какой-либо специальной инфраструктуры или главных серверов для работы. Также каждая ось может управляться через отдельный порт RS232.
8SMC4-ETHERNET/RS232-B19 содержит все необходимые подсистемы, в том числе: управление, блоки питания и т. д., которые поддерживают одновременную работу всех осей. Контроллер может быть подключен к ряду рабочих станций на базе ПК через Ethernet. Все пользователи имеют доступ к настройке диапазона доступных осей и назначению прав доступа. С точки зрения программиста, работа со всеми осями системы очень похожа на работу с простой коробкой 8SMC4-USB. Количество осей, доступных пользователю и обрабатываемых системой, может достигать 50000. На передней панели расположены светодиодные индикаторы питания и состояния, кнопки ручного управления, кнопка блокировки системы и порт Ethernet. На задней панели расположены разъемы двигателя и отдельные порты RS232 для каждой оси, разъемы ввода-вывода синхронизации, разъем питания и кнопка включения/выключения. Система охлаждается через отверстия в решетке на верхней и нижней стенках коробки.
| [1] | (1, 2) Артикул был изменен в 2020 г., ранее устройство имело артикул 8SMC4-USB-Eth. |