6.6. Неподдерживаемые примеры¶
Важно
Ниже приведены примеры, найденные в Интернете с открытым исходным кодом
За работоспособность примеров отвечает их разработчики
6.6.1. Пример шестиосного интерфейса XILab¶
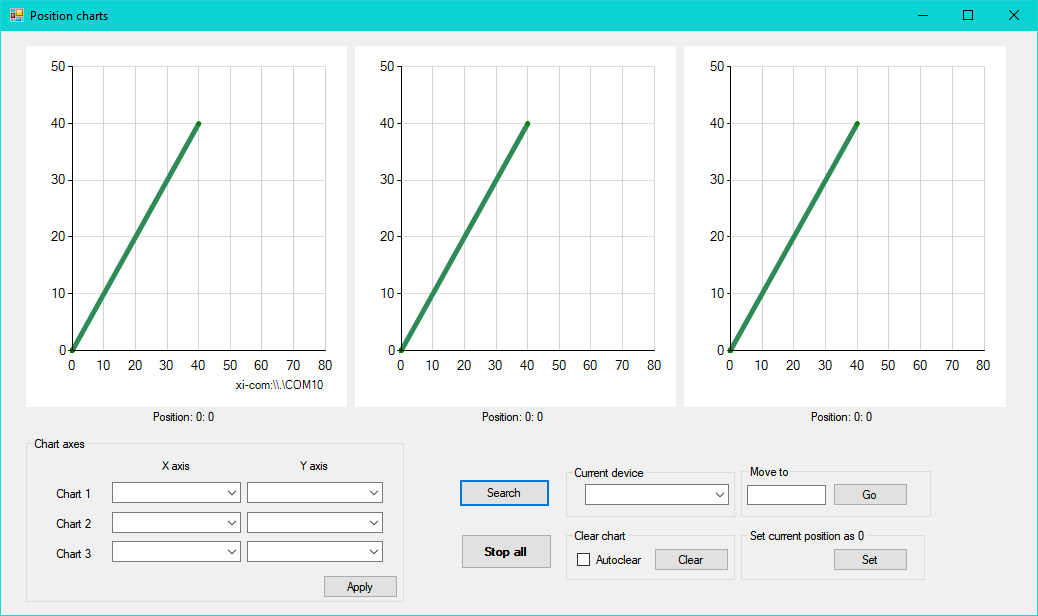
Программа позволяет работать с 6 устройствами в режиме реального времени на 3 графиках
Предварительно скомпилированные примеры были собраны с помощью Visual Studio 2013.
Пример и руководство выложены на GitHub: https://github.com/sushchev/testwfa.
6.6.2. Примеры для работы с аттенюатором для Python и LabView¶
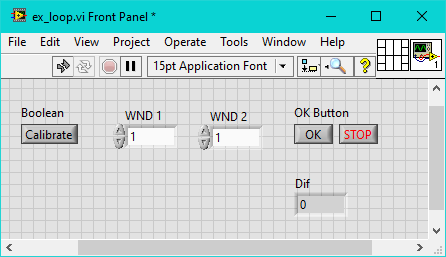
В этом проекте было реализовано несколько простых примеров использования протокола LibXIMC с контроллером 8SMC4/5-USB. В качестве управляемого устройства использовался вращающийся оптический аттенюатор. Примеры кода были написаны на Python 3.4, а также в среде программирования LabView.
Пример и руководство выложены на GitHub: https://github.com/Negrebetskiy/Attenuator.
6.6.3. Программа для отправки команд на контроллер XIMC с контроллера AVR¶
Важно
Написано в AtmelStudio7 для Atmel ATMEGA2560 16AU 1432 и используется с контроллером XIMC и шаговым двигателем ST5918L3008-B

Что делает эта программа:
- Получает текущее положение шагового двигателя.
- Перемещает его влево на 3 секунды и останавливает шаговый двигатель.
- Перемещает его в исходное положение
Пример и руководство выложены на GitHub: https://github.com/ntarabrina/XIMC_command.
6.6.4. Многоосевой интерфейс на Python¶
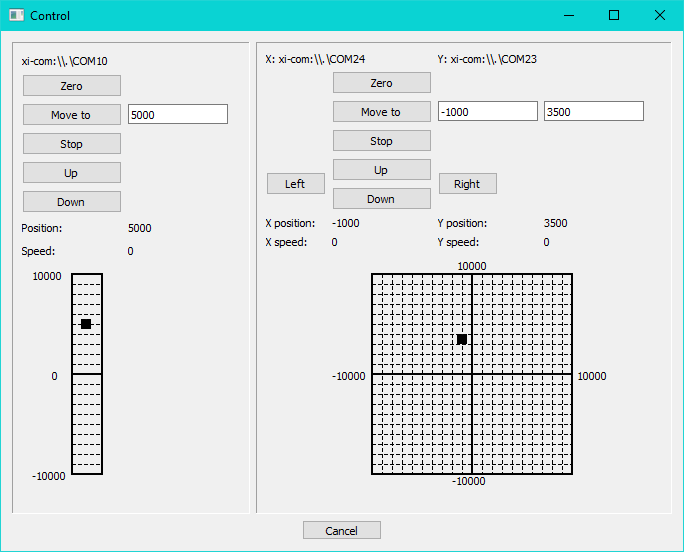
Пример программы с графическим интерфейсом, предназначенной для работы с несколькими сервоконтроллерами (до шести включительно, при необходимости легко увеличить это число) с помощью протокола XIMC. GUI был создан через пакет PyQt5.
Пример и руководство выложены на GitHub: https://github.com/Negrebetskiy/MultiAxleGUI.