3.4. Ручная настройка профиля¶
3.4.1. Введение¶
После подключения мотора, настраиваются необходимые для работы параметры (см. Пример подключения двигателя. Рассмотрим настройку профиля на примере шагового мотора Nanotec ST5918L3008-B.
3.4.2. Подготовка к работе¶
- Устанавливаем и запускаем XiLab (см. раздел Краткое руководство и начало работы).
- Загружаем профиль с выставленными по умолчанию настройками. Для этого откройте Settings -> Restore from file… и выберите xilabdefault.cfg, лежащий в корне папки с XiLab.
3.4.3. Настройка рабочего тока¶
Первоначально необходимо настроить правильный ток в обмотках двигателя:
Из спецификации находим ток фазы 2.1 А - это максимальное значение тока для данного мотора при соединении обмоток последовательно:
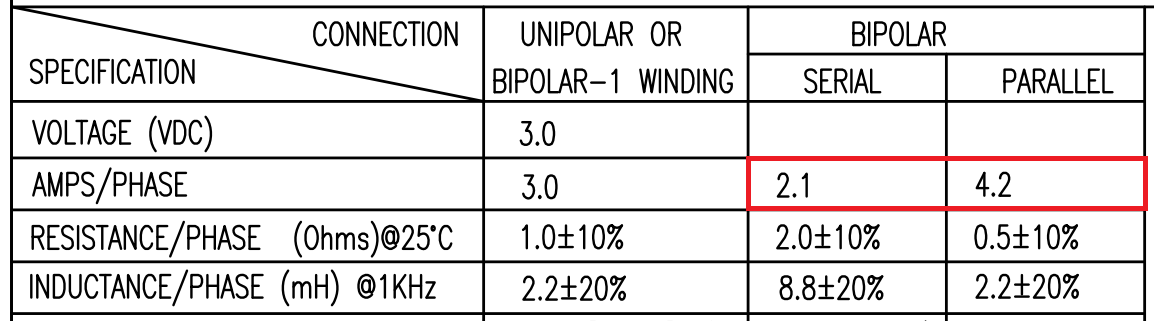
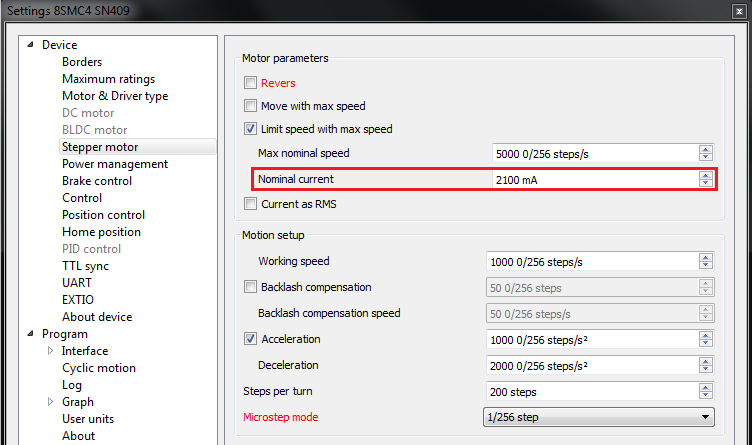
Находясь в окне Settings, откройте вкладку Stepper motor. Тут задаются такие параметры, как скорость вращения, ускорение, режим движения и др. (подробнее см. Настройка кинематики движения (Шаговый двигатель)). В поле Motor parameters-> Nominal current выставляется ток фазы для мотора. В это поле нужно вписать значение не превышающее 2.1 А:
3.4.4. Настройка базовых параметров¶
- Укажем скорость вращения в поле Working speed. Рекомендуемая величина скорости не более 1000 ш/с при первом запуске. В том же окне укажите Max Nominal Speed (5000 ш/с для большинства моторов и позиционеров является разумным значением) и установите галочку напротив Limit speed with max speed. Данная настройка нужна, чтобы ограничить скорость мотора, т.к. некоторые механические системы могут быть не рассчитаны на высокие скорости и слишком быстрое вращение может привести к сильному износу механики подвижки/мотора.
- Из спецификации мотора найдём количество шагов на оборот. Для нашего мотора это значение равно 200 ш. Укажем его в поле Steps per turn. Обычно в описаниях к мотору приводится величина одного шага в градусах, исходя из которой можно расчитать количество шагов на оборот, зная, что в одном обороте 360 градусов.
- Проверьте, что при старте движения вправо из главного окна XiLab подвижка физически тоже движется вправо. Если это не так, то поставьте галочку Reverse в поле Stepper motor -> Motor parameters.
3.4.5. Настройка аппаратных концевых выключателей, процедура автокалибровки.¶
Примечание
Данный пункт подразумевает использование позиционеров с аппаратными концевыми выключателями. Если в вашей системе аппаратные концевые выключатели не предусмотрены, то рекомендуется отключить остановку по концевикам в настройках. Для этого следует убрать галочки Stop at right border и Stop at left border во вкладке Borders.
Позиционеры бывают с ограниченным (трансляторы) и с неограниченным диапазоном движения (ротаторы). Ограничение диапазона перемещения может осуществляться с помощью концевых выключателей или по позиции. При работе с позиционерами первого типа при неправильной настройке концевых выключателей существует риск сломать механику, т.к. подвижная часть может попытаться выехать за пределы допустимого диапазона движения. У ротаторов такой проблемы нет. Также следует иметь ввиду, что у ротаторов может быть всего один концевик.
Для работы с концевыми выключателями контроллеру необходимо указать какой из них будет левым, а какой - правым. Иногда это заранее неизвестно, а известно лишь, что оба концевика подключены и срабатывают каждый по достижении своей границы перемещения. Если неправильно настроить концевики, то позиционер может заклинить. Поэтому контроллер поддерживает простую функцию обнаружения неверно настроенных концевиков, останавливаясь по обоим из них. Убедитесь, что:
Подвижная часть находится вдали от концевиков;
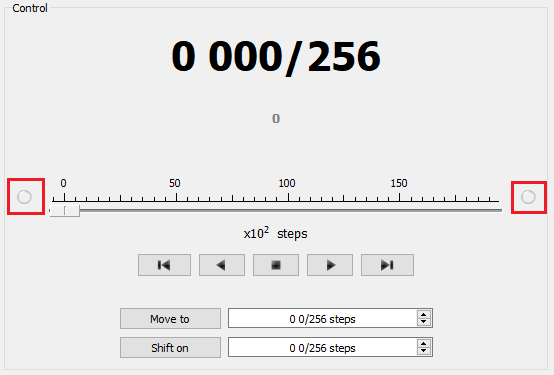
Полярность концевиков настроена правильно (индикаторы концевиков не горят в главном окне XiLab). В случае неправильной настройки, поменяйте их полярность (Borders -> Pushed position), индикаторы должны погаснуть.
Включена остановка по обоим концевикам (галочки напротив Stop at right border и Stop at left border во вкладке Borders).
Включите флаг обнаружения неправильного подключения концевиков Border misset detection во вкладке Borders.
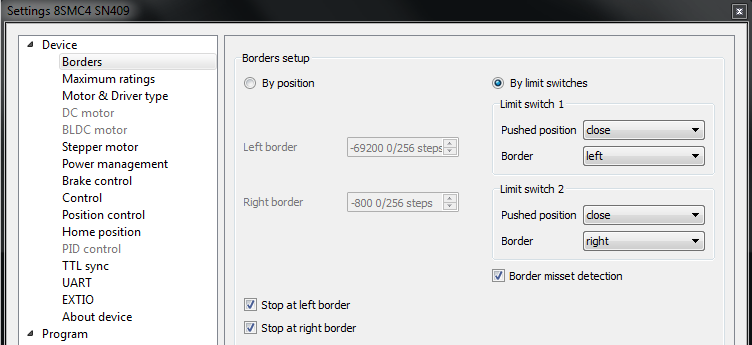
Вкладка с настройками концевиков
При обнаружении неверного срабатывания концевика, контроллер может перейти в режим Alarm, если включена настройка Enter Alarm state when edge misset is detected в меню Maximum ratings. Рекомендуется включить эту опцию. Начните движение в любую сторону из главного окна XiLab до остановки по концевику или перехода в режим Alarm. При возникновении Alarm нужно поменять концевики местами, изменив значения в полях Borders->Border на противоположные.
Предупреждение
Защита от перепутанных концевиков не гарантирует, что о проблеме перепутанности можно забыть. Она лишь облегчает первоначальную настройку. При перепутанных концевиках нельзя начинать движение, если какой-либо концевик активен, даже при включенной функции защиты.
Cуществует ещё 2 способа определения какой из концевиков правый, а какой левый:
- Необходимо знать, куда подсоединён каждый из концевиков в позиционере. При загрузке профиля с настройками по умолчанию, концевик, подсоединённый к пину 9 D-SUB разъёма контроллера, считается левым, а к пину 8 - правым. Их расположение относительно позиционера настраивается в полях Limit switch 1 и Limit switch 2 (см. скриншот выше). Запустите систему на маленькой скорости (<100 ш/с) вдали от концевиков. Если направление движения к концевику отличается от ожидаемого, измените значения в полях Borders->Border на противоположные.
- Если возможно подлезть к концевикам, то попробуйте активировать их и увидеть в главном окне XiLab загорающиеся индикаторы. Запомните, какой из индикаторов, какому концевику соответствует. Затем, вдали от концевиков, запустите систему на маленькой скорости (<100 ш/с) и убедитесь, что система движется в направлении срабатывания правильного выключателя. Соотнесите это с тем, что видите в главном окне XiLab. Если направление движения к концевику в реальной установке и в главном окне различаются, измените значения в полях Borders->Border на противоположные.
Для более подробной информации обратитесь к соответствующему пункту документации.
В контроллере предусмотрена полезная функция автокалибровки домашней позиции для установки начального положения позиционера.
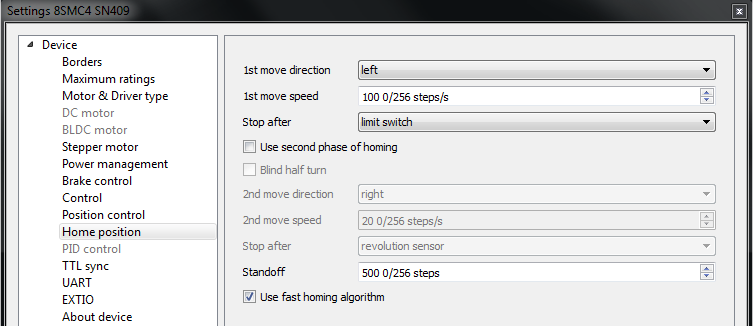
Рассмотрим наиболее простой вариант настройки с одной фазой движения. Начать следует с установки скорости первой фазы (1st move speed) примерно в 5-10 раз меньшей, чем Working speed. Это нужно для более высокой точности процедуры автокалиборовки. В поле Stop after укажите limit switch, чтобы в процессе автокалибровки подвижка доезжала до одного из концевиков (до правого или левого - выбирается в поле 1st move direction). В поле Standoff укажите число в шагах, на которое подвижка должна отъехать от концевика. Нажмите Ok или Apply.
Примечание
Значение в поле Standoff является знаковым. Положительное направление - право. То есть, если процедура автокалибровки настроена по правому концевику, то для того, чтобы подвижка отъехала от него влево в поле Standoff должно быть отрицательное значение.
- Запустите процедуру автокалибровки, нажав на кнопку Go home в главном окне XiLab. Результатом будет движение подвижки до указанного концевика с относительно низкой скоростью и смещение от него в сторону на значение, указанное в поле Standoff.
- После выполнения автокалибровки нажмите Zero в главном окне XiLab для установки начала системы отсчёта.
- Повторите процедуру калибровки второй раз. Подвижка, при этом, должна снова вернуться в нулевую позицию. Обратите внимание, что могут быть небольшие отклонения от нуля, связанные с погрешностью процедуры автокалибровки.
3.4.6. Настройка параметров энкодера¶
Примечание
Данный пункт подразумевает использование мотора с энкодером. Если у вас двигатель без энкодера, то описанные ниже параметры можно оставить без изменений.
Каждый энкодер имеет характеристику, указывающую количество импульсов на оборот (Pulse Per Turn - PPT). Для корректной работы энкодера с контроллером, необходимо в интерфейс XiLab, в поле Encoder counts per turn (вкладка Stepper motor) вписать количество отсчётов энкодера на оборот, которое равно 4xPPT. Например, если ваш энкодер имеет 1024 импульса на оборот, то в поле Counts per turn вписывается число 4096:
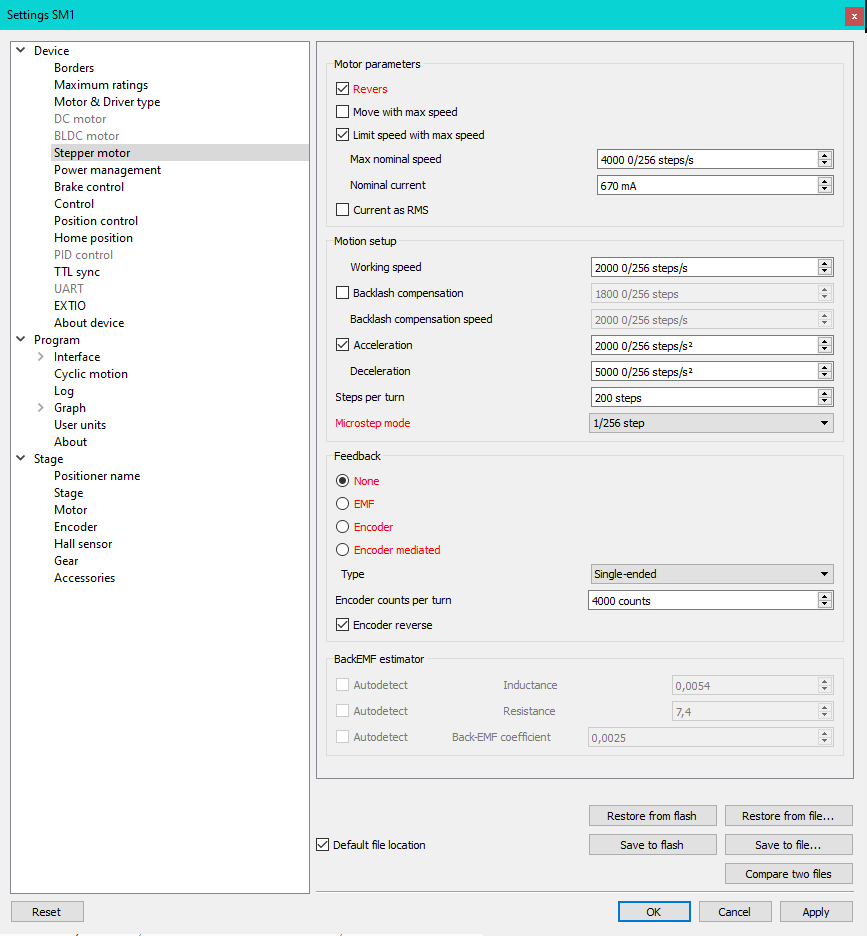
Запустите вращение из главного окна XiLab. Если всё настроено правильно, то внизу окна загорится зелёным индикатор ENCD. В случае, если ENCD имеет жёлтый цвет, то следует поставить галочку Encoder reverse во вкладке Stepper motor, в поле с настройками энкодера. Красный цвет EDCN указывает на наличие проблем с пересчётом позиции по энкодеру.
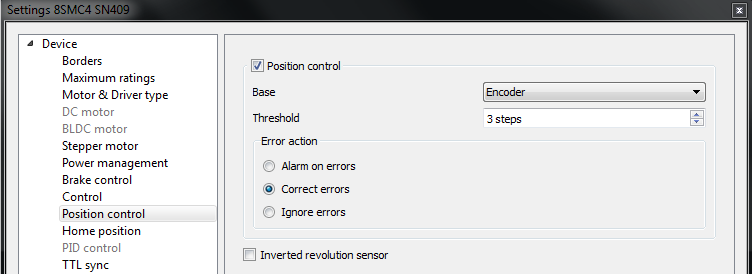
Существует возможность активировать контроль позиции по энкодеру. Для этого во вкладке Position control следует поставить галочку Position control и в поле Threshold указать допустимую ошибку в отсчётах энкодера. Тогда при рассогласовании позиции с отсчётами энкодера, в главном окне XiLab будет загораться индикатор SLIP и, если стоит галочка Alarm on errors, контроллер будет переходить в состояние Alarm. Установка Correct errors позволяет контроллеру работать в режиме ведущего энкодера, компенсируя разницу между реальной позицией и позицией, соответствующей отсчётам энкодера.
3.4.7. Настройка кинематических характеристик контроллера¶
Во вкладке Stepper motor можно указать необходимое ускорение (Acceleration) и замедление (Deceleration) для используемого шагового двигателя. Процедура выбора оптимальных значений следующая:
- Начиная со значений по умолчанию, делайте небольшие сдвиги мотора (старт и быстрый стоп), постепенно увеличивая Acceleration до тех пор, пока движение при этом не начнёт срываться или быть нестабильным. Примите ускорение равным примерно половине этого значения.
- Замедление можно настроить примерно в 1.5 - 2 раза больше, чем ускорение
Если в вашей механической системе подъезд в желаемую позицию слева и справа неодинаков и присутствует люфт, то есть возможность устранить эту неоднозначность. Для этого поставьте галочку напротив Backlash compensation в «Stepper motor» и укажите значение, превышающее величину люфта. Знак этой настройки определяет направление подхода. Положительный знак означает подход слева, а отрицательный - справа. В поле Backlash compensation speed настройте скорость, с которой будет выполняться компенсационное движение. Её величина должна быть маленькой (значения 50 ш/с достаточно), чтобы не было «заносов» во время антилюфта.
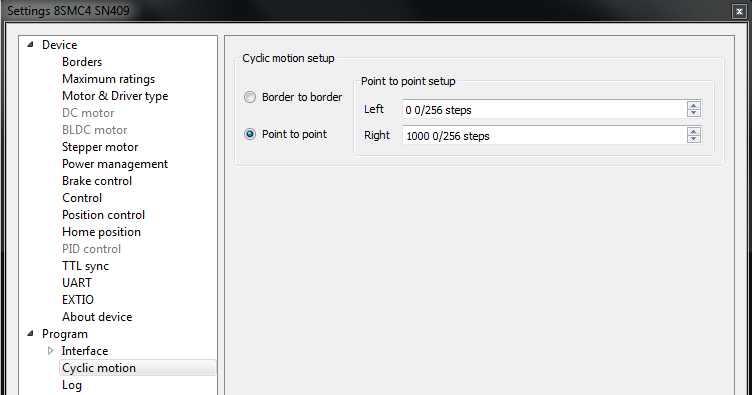
После основной настройки позиционера/мотора можно увеличить рабочую скорость. Процедуру настройки рабочей скорости можно провести экспериментально, подобно процедуре настройки ускорения, т.е. выбрать значение примерно в 2 раза меньшее, чем то, при котором наблюдается нестабильное движение. Для проверки стабильности вращения рекомендуется воспользоваться функцией Cyclic в интерфейсе главного окна, предварительно её настроив.
В поле Microstep mode мы рекомендуем оставить значение 1/256 шага.
3.4.8. Работа с пользовательскими единицами измерения¶
Зачастую неудобно работать с шагами и микрошагами и хочется работать с более удобными единицами измерения. По этой причине в контроллере есть возможность пересчитывать координаты в привычные единицы измерения, например в миллиметры или градусы. Это делается во вкладке User units, где указывается величина шага и соответствующая ей единица измерения. Для более подробной информации обратитесь к соответствующему пункту документации.
Настройка рабочего профиля завершена.