3.1. Краткое руководство и начало работы¶
Внимание
Это руководство является универсальным для контроллеров 8SMC4 и 8SMC5 как для одноосных так и для двухосных
3.1.1. Введение¶
Данное руководство описывает установку контроллера и начало работы c программным обеспечением XILab для Windows 7. Установка программы на другие ОС описана в разделе Установка XILab. Подробно с характеристиками контроллера вы можете ознакомиться в разделе Технические характеристики. Для разработки собственных приложений для контроллера рекомендуем ознакомиться с разделом Руководство по программированию и скачать пакет программ для разработки приложений в разделе Программное обеспечение.
3.1.2. Системные требования¶
Примечание
В настоящем разделе требования описаны кратко. Подробно системные требования описаны в разделе Технические характеристики.
Для успешной настройки контроллера необходимо иметь:
Компьютер с наличием USB разъёма
Компьютер с наличием USB разъёма
Убедитесь, что у вас установлены все актуальные обновления системы Windows. Это позволяет поддерживать совместимость вашего компьютера с новым программным обеспечением. Посмотреть и скачать обновления, если это необходимо, можно по ссылке www.microsoft.com/updates.
Программное обеспечение Всё необходимое ПО для работы с контроллером можно скачать по ссылке Программное обеспечение.
USB A - mini-B кабель

USB-A – мини-USB-B кабель
Подробней о USB кабеле смотрите в разделе Разъём управления платой контроллера или Разъём управления 1 и 2-осной системами.
Важно
Контроллеры 8SMC4/5-USB для правильной работы требуют минимального напряжения 12 В.
Контроллер 8SMC4-USB может работать от USB (5 В), но питания от USB будет не достаточно для вращения двигателем.
8SMC4-USB-B8-1

Одноосный контроллер 8SMC4-USB-B8-1
8SMC4-USB-B9-2
-rear.jpg)
Двухосный контроллер 8SMC4-USB-B9-2
В зависимости от комплектации и версии, внешний вид контроллера может отличаться от приведенного на рисунке. Более подробную информацию о версиях контроллеров можно найти в разделе Внешний вид и разъемы.
Позиционер или мотор

Позиционер на базе шагового двигателя
На рисунке представлен используемый в работе позиционер на базе шагового двигателя, более подробно о требованиях к электромотору написано в разделе Технические характеристики. Если подразумевается использование собственных кабелей для подключения контроллера к позиционеру, пожалуйста, руководствуйтесь схемой соединения контроллера и позиционера, а также схемой расположения выводов контроллера. Для позиционеров с конечным диапазоном перемещения следует использовать два концевых выключателя: SW1 и SW2. Данные контакты используются для определения границ движения подвижки.
Блок питания

Cтабилизированный источник питания
Примечание
- Используйте стабилизированный источник питания 12 - 36 В. Слишком высокое напряжение может повредить контроллер. Подробней смотрите Техника безопасности. Рабочий ток блока питания должен быть достаточен для стабильного вращения двигателя.
- Обратите внимание на инструкцию, прилагаемую к вашему контроллеру. В зависимости от модели контроллера, возможно более строгое ограничение на питающее напряжение. Внимательно проверьте соединение контроллера с внешним источником питания.
- Если контроллер поставляется с металлическим корпусом, то корпус требует заземления. Заземление контроллера, в случае, если он поставляется без корпуса, происходит через «землю» блока питания. Более подробно о заземлении смотри в разделе Техника безопасности.
- Убедитесь, что работающая без корпуса плата контроллера лежит на не проводящей электрический ток поверхности, а также в отсутствии посторонних частиц на плате и около нее.
3.1.3. Установка ПО и первый пуск¶
Убедитесь, что все контроллеры отключены от компьютера. Руководство по установке программного обеспечения находится здесь. Выберите файл «xilab-<version_name>.exe». Инсталлятор автоматически определяет, запущен ли он на 32-битной или 64-битной системе и устанавливает соответствующую версию. Появится окно установки (версии программного обеспечения могут немного отличаться).
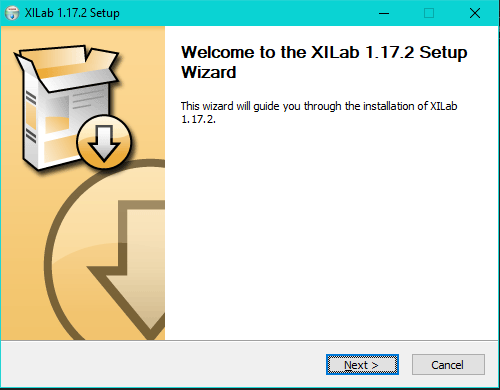
Первое окно установки XILab
Нажмите кнопку «Next>» и следуйте инструкциям на экране. Все необходимое программное обеспечение, включая драйверы, пакеты и программы, будет установлено автоматически. После установки по умолчанию запустится программа XiLab и появится следующее окно:
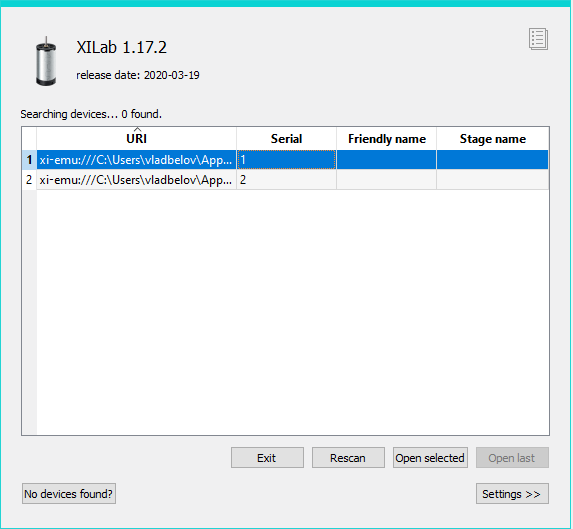
Диалоговое окно программы XILab «No devices found» (устройства не найдены)
Не нажимайте никаких кнопок. Подключите позиционер к контроллеру. Подключите стабилизированный источник питания к контроллеру. Заземлите контроллер или блок питания. Подключите контроллер к компьютеру, используя USB-A – мини-USB-B кабель.
LED индикатор на плате контроллера начнет мигать. Мастер New Hardware Wizard начнет работать после первого подключения контроллера к компьютеру. Подождите пока Windows обнаружит новое устройство и установит необходимые драйверы для него.
Если драйвер автоматически не установился, то в появившемся окне выберите «No, not this time», затем нажмите «Next>». В следующем окне выберите «Install from a list or specific location (Advanced)» и нажмите «Next>». Выберите *.inf файл на диске с ПО, поставляемым с контроллером, или в директории C:\Program Files\XILab\driver\ и подождите, пока установка будет завершена.
Вернитесь к диалоговому окну программы XILab «No devices found» и нажмите «Retry». Если данное окно было закрыто, перейдите в меню «Start», выберите Programs -> XILab Х.Х.Х -> XILab и запустите. Тогда указанное окно появится.
3.1.4. Начало работы в ПО XILab¶
XILab представляет собой удобный графический интерфейс пользователя для контроля работы, диагностики и настройки двигателей. Он также может быть использован для легкой установки и сохранения/загрузки параметров для любого двигателя. В этом разделе рассмотрено начало работы с XILab. Для получения полной информации о работе программы, рекомендуем Вам ознакомиться с разделом Руководство по программе XILab.
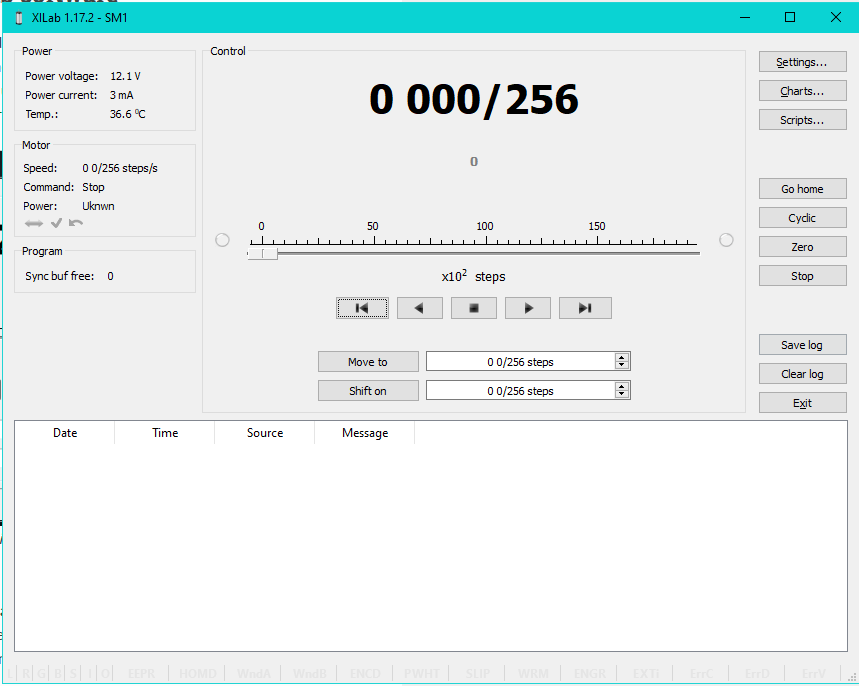
Главное окно программы XILab
Откройте «Settings…», нажмите на кнопку «Restore from file…» и выберите конфигурационный файл для вашего позиционера из открывшейся папки C:\Program Files\XILab\profiles\. Все поля меню «Settings…» автоматически будут заполнены значениями, подобранными для вашего позиционера. Если нужный файл не найден, посмотрите на сайте компании Standa. Если и там вы не найдете решения, оставьте нам запрос на сайте поддержки.
XILab, меню Settings
Предупреждение
Для работы контроллера с шаговыми двигателями обязательна корректная установка:
- рабочего тока,
- границ движения и концевиков,
- критических параметров,
- ограничителей,
- режима питания мотора.
Если вы решили настроить контроллер самостоятельно, обязательно проверьте эти настройки!
Контроллер готов к работе!
3.1.5. Проверка работоспособности¶
Для проверки правильной настройки контроллера нажмите в главном окне XiLab клавишу влево или вправо в центральном ряду клавиш управления. Позиционер должен начать двигаться. Для остановки вращения используйте центральную клавишу плавной остановки. Обратите внимание на параметры питания контроллера в блоке Power. Там можно контролировать питающее напряжение, потребляемый ток и температуру контроллера.
Если при старте движения главное окно XiLab окрасилось в красный цвет, то это свидетельствует о сработавшей защите и попадании в режим Alarm. Это может быть вызвано неправильными настройками, неверным подключением позиционера или неисправностью контроллера. Подробней смотрите в разделе Критические параметры.
3.1.6. Управление из пользовательских приложений¶
Для удобного управления контроллером Вы можете использовать программу Xilab. Однако, если у Вас есть необходимость управлять контроллером из собственных приложений, Вы легко сможете это сделать, используя функции библиотеки libximc. В комплекте разработчика библиотеки представлены примеры на различных языках программирования: C, C#, Python, Delphi, Java, VB.net, Matlab, LabView. Если Вам необходимо автоматизировать небольшое количество действий, то, возможно, вместо разработки собственной программы Вы сочтете более целесообразным использовать для этого скриптовый язык программы Xilab.