4.3.1. Поддерживаемые типы двигателей¶
В настоящий момент контроллер поддерживает шаговые и DC двигатели. Характеристики поддерживаемых двигателей можно посмотреть в разделе Технические характеристики .
4.3.1.1. Шаговые двигатели¶
Основным параметром шагового двигателя является его номинальный ток. Номинальный ток двигателя можно установить во вкладке Настройка кинематики движения (Шаговый двигатель).
Важно
Установка завышенного тока постепенно приведёт к перегреву двигателя и его физической поломке. Обязательно проконтролируйте, чтобы был установлен номинальный ток, соответствующий используемой подвижке. В предустановленных профилях подвижек все настройки уже сделаны правильно.
Другим важным параметром является режим деления шага. В полношаговом режиме двигатель перемещается на величину угла шага (например, двигатель с шагом 1,8° совершает 200 шагов за один полный оборот). В режиме деления шага основной шаг двигателя может делиться до 256 раз. Деление шага улучшает гладкость перемещений и минимизирует эффекты резонанса на низких скоростях.
Доступны следующие режимы деления шага:
- 1 (полный) шаг
- 1/2 шага
- 1/4 шага
- 1/8 шага
- 1/16 шага
- 1/32 шага
- 1/64 шага
- 1/128 шага
- 1/256 шага
Режим микрошага устанавливается во вкладке Настройка кинематики движения (Шаговый двигатель) или командами настройки мотора, см. раздел Описание протокола обмена и описание соответствующих функций в разделе Руководство по программированию.
Примечание
Контроллер всегда использует внутреннее деление шага 1/256. При смене пользователем деления шага на более грубый, в ПО отображаются только кратные более грубому делению позиции, установка и передача становится возможна только в таких, более грубых делениях. Это сделано для поддержки устаревшего и совместимости с уже существующим ПО, работающим на делениях шага малой кратности. С другой стороны, работа на наибольшем делении шага позволяет двигаться наиболее плавно и тихо на малых скоростях.
Еще один непосредственным параметром шагового двигателя является количество полных шагов на оборот. Эта настройка не влияет на движение, но используется в блоке контроля проскальзывания или при работе с обратной связью по энкодеру.
Примечание
Контроллер поддерживает шаговые двигатели с датчиком обратной связи - энкодером. Энкодер может использоваться как основной датчик положения (подробнее) или для обнаружения проскальзывания, люфта или потери шагов (подробнее). Использование энкодера способствует стабильному прохождению резонансных скоростей без срыва движения.
4.3.1.2. DC двигатели¶
В отличии от шагового двигателя, для управления DC двигателем контроллеру необходимо наличии обратной связи позиции двигателя. В настоящее время, в качестве датчика обратной связи поддерживается только энкодер.
Основными параметрами двигателя являются максимальный ток и напряжение, которые устанавливаются во вкладке Настройка кинематики движения (DC мотор). Основным параметром энкодера является количество отсчетов на оборот.
Важно
Установка завышенного тока постепенно приведёт к перегреву двигателя и его физической поломке. Обязательно проконтролируйте, чтобы был установлен номинальный ток, соответствующий используемой подвижке. В предустановленных профилях подвижек все настройки уже сделаны правильно.
Важно
Установка неправильного значения количества отсчетов энкодера на оборот приведет к тому, что установленное значение скорости не будет выдерживаться правильно. В некоторых случаях это может привести к поломке подвижки или редуктора.
Управление DC двигателем производится с помощью ПИД регулятора. Перед началом работы рекомендуется внимательно ознакомиться с разделом ПИД алгоритм для управления DC двигателем.
Важно
Неправильные настройки ПИД регулятора могут привести к поломке подвижки. В предустановленных профилях подвижек все настройки уже сделаны правильно. Без крайней необходимости не рекомендуется самостоятельно изменять данные настройки.
4.3.1.3. Критерий выбора двигателя¶
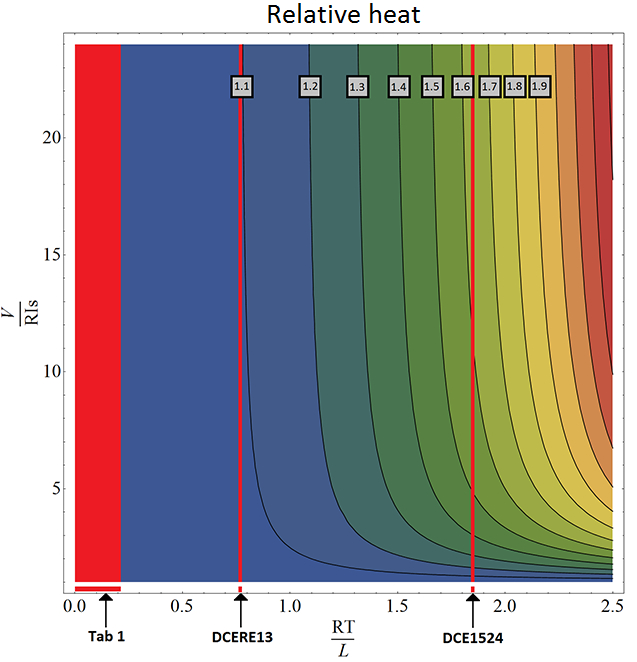
Для управление током в обмотках двигателях используется принцип широтно-импульсной модуляции, приводящий к колебаниям тока на частоте модуляции (так называемый «токовый риппл»). В зависимости от параметров используемого двигателя (индуктивность его обмоток, омическое сопротивление) риппл может быть разным. Такие резкие колебания тока могут приводить к тому, что мотор нагреется сильнее, чем ожидается при номинальном токе, т.е. \(\frac{P_{real}}{RI_s^2} > 1\) , где \(RI_s^2\) - мощность, которая ожидалась бы при прохождении постоянного тока \(I_s\), \(P_{real}\) - действительная мощность, выделяемая в двигателе. Чтобы оценить перегрев, рекомендуем воспользоваться следующим графиком:
| Мотор | RT/L |
|---|---|
| 20 | 0.19576 |
| 28 | 0.07253 |
| 28s | 0.07168 |
| 4118L1804R | 0.02715 |
| 4118S1404R | 0.02844 |
| 4247 | 0.0273 |
| D42.3 | 0.0223 |
| 5618 | 0.0146 |
| 5618R | 0.0146 |
| 5918 | 0.0116 |
| 5918B | 0.012 |
| VSS42 | 0.029 |
| VSS43 | 0.0256 |
| ZSS | 0.04248 |
| DCERE25 | 0.2106 |
Последовательность действий:
- Расчёт параметра \(\frac{RT}{L}\), где \(R, L\) - сопротивление и индуктивность обмотки (см. документацию на соответствующий двигатель), \(T\) - время периода модуляции. Его следует взять равным 51.2 мкс для шаговых двигателей и 25.6 мкс для двигателей постоянного тока.
- Расчёт параметра \(\frac{V}{RI_s}\), характеризующего превышение питающего напряжения над номинальным. Тут \(V\) - напряжение питания, \(R\) - сопротивление обмотки, \(I_s\) - ток стабилизации.
- Определение перегрева. После первых двух шагов на график можно нанести соответствующую точку. Теперь нужно определить области, которые соответствуют степеням перегрева. Например, области между линиями 1.1 и 1.2 соответствуют значениям перегрева \(1.1 * RI_s^2\) and \(1.2 * RI_s^2\).
Пример расчёта для двигателя DCE1524:
- \(T\) = 25.6 мкс
- \(R\) = 5.1 Ом
- \(L\) = 70 мкГн
- \(\frac{RT}{L}\) = 1.86
Далее проводим вертикальную линию, по которой можно сделать вывод какой будет перегрев при разных питающих напряжениях (эта линия проведена на графике выше). Допустим, что желаемый ток стабилизации \(I_s = 500 мА\). Номинальное напряжение в таком случае: \(R * I_s\) = 2.55 В. Тогда при превышении этого напряжения больше чем в 5, но меньше чем в 10 раз, перегрев будет между 1.5 и 1.6. А при питающем напряжении в 30 В двигатель нагреется в \(\simeq\) 1.65 раз сильнее чем ожидается.
Для облегчения работы, все основные двигатели и их параметры были рассчитаны (см. Значения параметра RT/L для некоторых моторов).