5.3.5. Home position settings¶
In the Application settings Device -> Home position
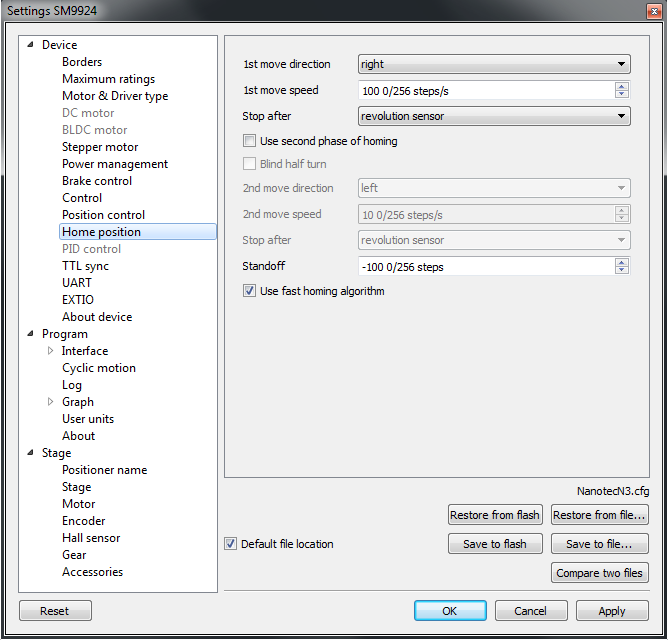
Home position settings window
Tab Home position sets the home position calibration parameters.
- 1st move direction - sets the movement direction for the motor to search for a stop signal (right or left) for standard and fast homing algorithms.
- 1st move speed - sets the speed for the first phase of the standard homing algorithm and the second phase of the fast homing algorithms.
- Stop after - sets the source of the stop signal (limit switch, revolution sensor or external synchronization pulse).
- Use second phase of homing - this flag enables the accurate additional calibration of the home position (second phase of the standard calibration algorithm).
- Blind half turn - when the flag is set the motor ignores the stop signal for the second phase of homing for half a turn of the motor. This option allows to specify an unambiguous sequence of receiving stop signals for the first and second phases of homing in the case when the sensors are located close enough to each other.
- 2nd move direction - sets the movement direction for the motor to search for a stop signal (right or left) for the second phase of the standard homing algorithm.
- 2nd move speed - sets the speed for the second phase of the standard homing algorithm.
- Stop after (in the block of settings for the second phase of homing) - sets the source of the stop signal (limit switch, revolution sensor or external synchronization pulse). The signal source may differ from that used for the first phase of homing.
- Standoff - sets the distance for the final offset from the reference point. The direction of the offset is given by the sign of the value of this distance (a positive standoff means an offset to the right, a negative standoff - to the left).
- Use fast homing algorithm - this flag enables the fast homing algorithms to speed up the home calibration procedure.