5.3.1. Settings of kinematics (stepper motor)¶
In the Application settings Device -> Stepper motor
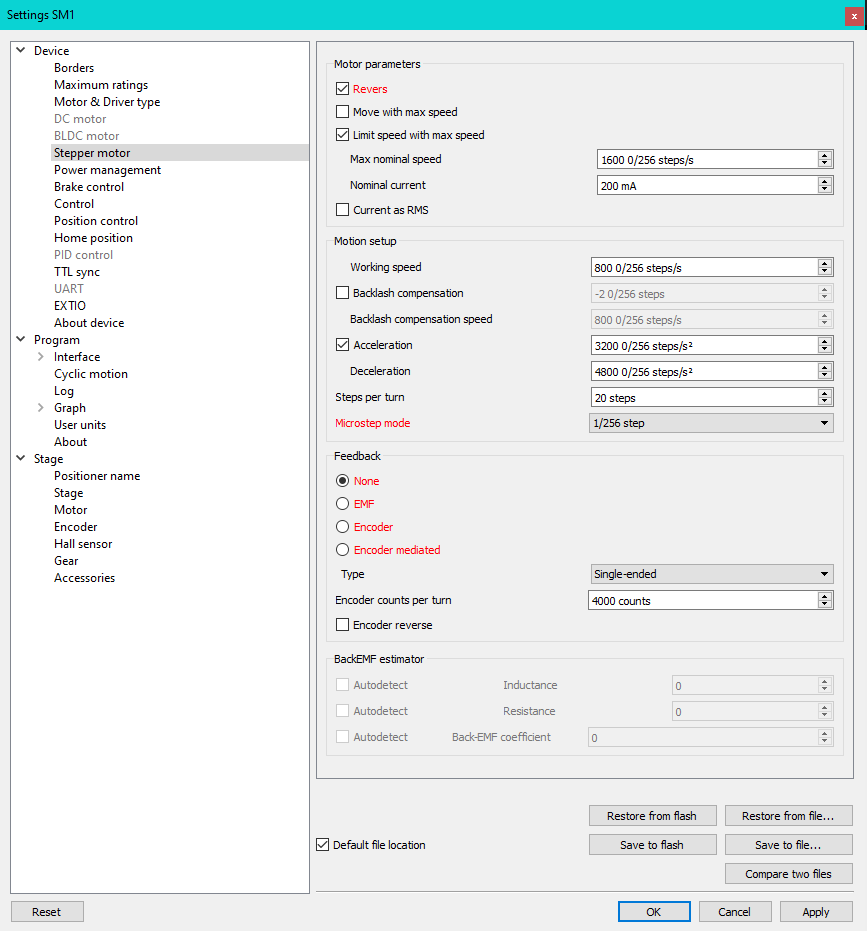
Settings of stepper motor kinematics window
5.3.1.2. Motion setup - movement kinematics settings¶
Working speed - movement speed.
Backlash compensation - backlash compensation. Since the stage mechanics are not ideal there is a difference between approaching a given point from the right and from the left. When the backlash compensation mode is on the stage always approaches the point from one side. The preset value determines the number of steps which the stage takes to pass a given point in order to come back to it from the same side. If the specified number is above zero the stage always approaches the point from the right. If it is below zero the stage always approaches the point from the left.
Backlash compensation speed - speed of backlash compensation. When the backlash compensation mode Backlash compensation is on the stage approaches the point from the right or from the left with a preset speed determined in the number of steps per second.
Acceleration - enables the motion in acceleration mode, the numerical value of the field is the acceleration of movement.
Deceleration - movement deceleration.
Steps per turn - determines the number of steps for one complete motor revolution. The parameter is set by user.
Microstep mode - step division mode. 9 modes are available: from a whole step to the 1/256 of a step. Description of modes is in the Supported motor types.
5.3.1.3. Feedback settings¶
An encoder can be used as feedback sensor for stepper motors. The following encoder types are available: Single-ended, Differential or Autodetect.
Encoder counts per turn - this parameter defines the number of encoder pulses per one full motor axis revolution.
Encoder reverse - interpret encoder signal as if it were reversed.