5.3.12. Settings of kinematics (DC motor)¶
In the Application settings Device -> DC Motor
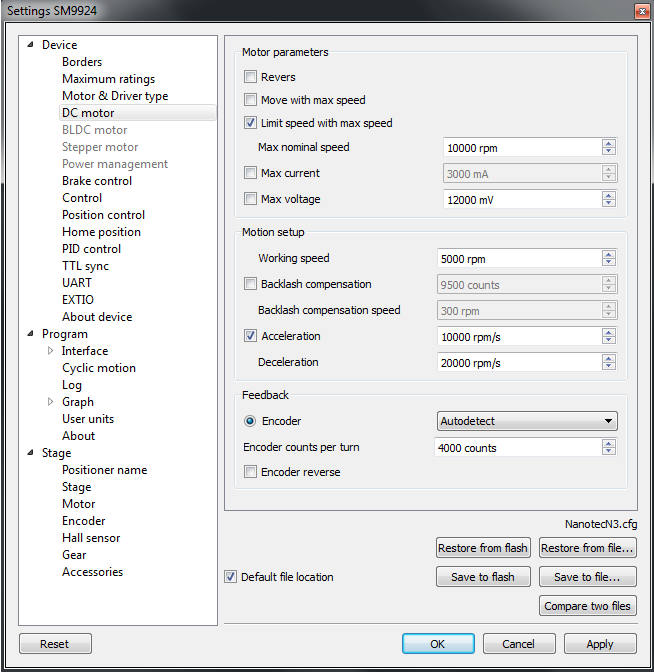
Settings of kinematics (DC motor) window
5.3.12.1. Motor parameters - electric motor settings¶
Revers - checking this flag associate the motor rotation direction with the current position counting direction. Change the status of the flag if positive motor rotation decreases the value on the position counter register. This flag effect is similar to connecting the motor winding to reverse polarity.
Move with max speed - if this flag is checked motor ignores the preset speed and rotates at the maximum speed limit.
Limit speed with max speed - if this flag is checked the controller limits the maximum speed to the number of steps per second, specified in the Max nominal speed field.
Max nominal speed, Max voltage, Max current - are motor nominal parameters. If they are active and applicable for given type of motor, the controller limits these parameters within the specified values. For example, if the motor speed and voltage exceeds the nominal values, the controller will reduce output action until both values are within the normal range. However, the controller remains in operational condition, and will execute the current task.