5.2.3. Главное окно программы XILab в режиме управления несколькими осями¶
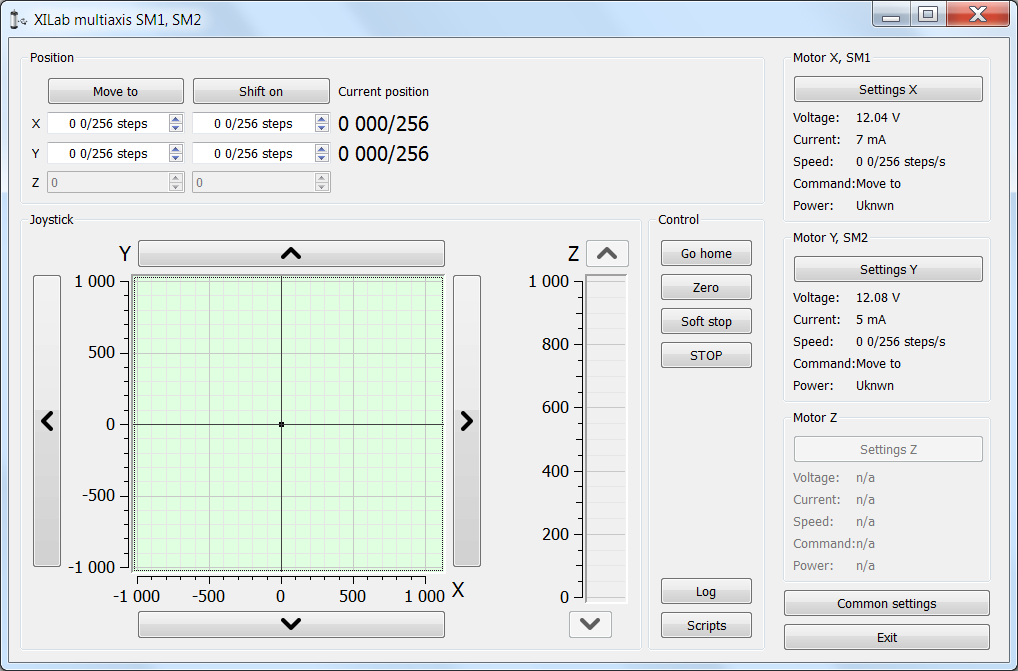
Главное окно программы XILab
В левой верхней части окна в группе параметров Position находятся индикаторы текущей позиции. В левой нижней части окна расположены блоки Joystick и Control, представляющие собой графический элемент управления движением по нескольким осям и блок кнопок соответственно. В правой верхней части в блоках Motor находятся данные о состоянии контроллеров и подключенных к ним моторов в настоящий момент. В правой нижней части окна расположена группа кнопок для управления программой в целом. Рассмотрим эти группы более подробно.
5.2.3.1. Блок позиции и движения¶
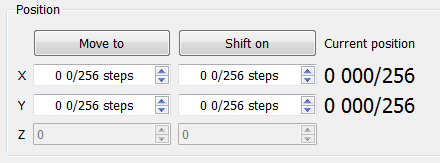
Блок позиции и движения
В столбце Current position расположены индикаторы текущей позиции в шагах или калиброванных единицах (см. далее) для осей X, Y и Z сверху вниз. Кнопка Move to осуществляет перемещение в координату, задаваемую элементами управления в этом столбце, а кнопка Shift on осуществляет смещение на задаваемое расстояние от текущей позиции. Если какой-то из контроллеров отсутствует или временно отключен, то соответствующая ему строка становится недоступной.
5.2.3.2. Блок виртуального джойстика¶
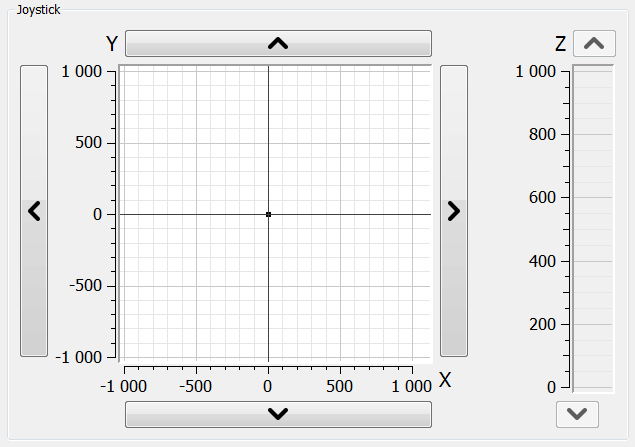
Блок виртуального джойстика
В этом блоке текущая координата контроллеров визуализируется точкой с двумя линиями на плоскости для осей X-Y и линией для оси Z.
Здесь также возможно управлять движением контроллеров несколькими способами:
- При клике мышкой где-либо на плоскости X-Y или в столбце Z соответствующий контроллер или контроллеры начинают движение в выбранную координату со своими настройками движения.
- При нажатии и удержании мышкой экранных кнопок со стрелками вверх, вниз, вправо и влево соответствующая ось начинает движение в выбранном направлении. Движение прекращается с замедлением при отпускании кнопки (посылается команда SSTP).
- При нажатии и удержании кнопок клавиатуры вправо, влево, вверх, вниз, PageUp, PageDown при нахождении фокуса ввода в блоке джойстика ось X, Y или Z соответственно начинает движение в направлении увеличения или уменьшения координаты. Движение прекращается с замедлением при отпускании кнопки (посылается команда SSTP). Наличие фокуса ввода в блоке джойстика можно отследить по изменению цвета его фона с белого на светло-зеленый.
Масштаб осей задается в блоке «Slider settings» вкладки General motor в окне Settings индивидуально для каждого контроллера. Если включена опция пользовательских единиц, то координата по соответствующей оси отсчитывается в этих единицах. В случае если считанное из контроллера положение по какой-либо оси выходит за диапазон оси то соответствующий индикатор не отображается.
5.2.3.3. Блок управления¶
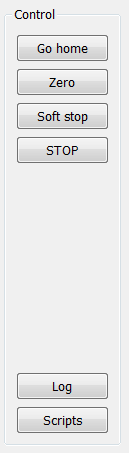
Блок управления
Кнопка Go home осуществляет поиск начальной позиции независимо для каждого контроллера, см. раздел Настройка исходного положения.
Кнопка Zero обнуляет текущую позицию мотора и значение энкодера для каждого контроллера.
Кнопка Soft stop выполняет команду плавной остановки для каждого контроллера.
Примечание
Кнопка STOP посылает команду экстренной остановки каждому контроллеру, сбрасывает их состояния Alarm, очищает их буферы команд для синхронного движения и останавливает выполнение скрипта, если он запущен.
Кнопка Log открывает окно, отображающее лог программы. Сюда попадает диагностическая информация (ошибки, предупреждения, информационные сообщения) от самой программы XiLab, от библиотеки libximc, а также от исполняемых скриптов.
Кнопка Scripts открывает окно работы со скриптами, см. раздел Скрипты.
5.2.3.4. Блок индикаторов состояния контроллеров и моторов¶
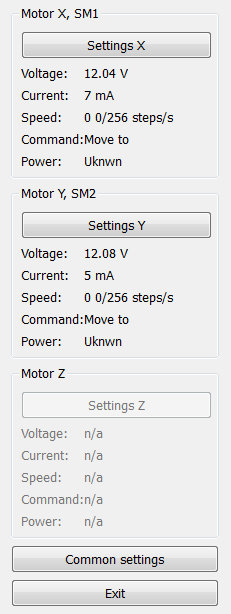
Блок индикаторов состояния контроллеров и моторов
Здесь расположены три блока индикаторов состояния контроллеров и моторов для осей X, Y и Z. В заголовке блока расположен серийный номер соответствующего контроллера. Каждый блок содержит индикаторы:
- Voltage - напряжение на силовой части мотора.
- Current - ток потребления силовой части мотора.
- Speed - текущая скорость мотора.
- Command - последняя выполненная или выполняемая команда контроллера.
- Power - состояние питания мотора.
Кнопка Settings X,Y,Z открывает настройки контроллера соответствующего этой оси, см. раздел Настройки программы.
Снизу от блоков индикаторов состояния расположены две кнопки: Common settings и Exit.
Кнопка Common settings открывает диалог с общими настройками, включающими в себя настройки логирования и соответствие серийных номеров контроллеров отображаемым осям X, Y и Z.
Кнопка Exit осуществляет корректное завершение работы, см. раздел Корректное завершение работы.
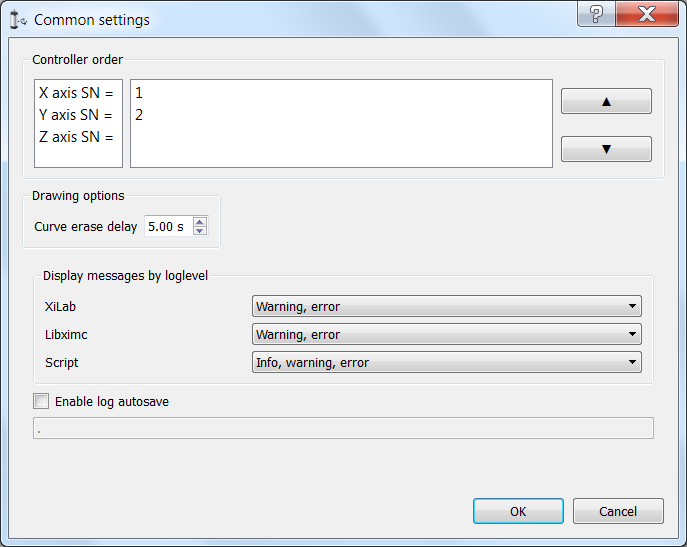
Диалоговое окно общих настроек многоосного интерфейса
В окне общих настроек расположен блок управления порядком отображения осей в интерфейсе, блок настроек отрисовки кривой движения и блок настроек логирования.
Порядок осей можно менять, выбрав серийный номер желаемой оси и нажимая кнопки «вверх» и «вниз», которые расположены справа.
Первая ось в списке, то есть ось с серийным номером в строке справа от надписи «X axis SN = » будет идентифицироваться как «ось X», вторая как «ось Y», третья, если она присутствует, как «ось Z».
Если вы введете значение N, большее нуля секунд в элементе управления «Удержание стирания» в «Параметры рисования», то последние N секунд движения контроллера оси X и Y будут отображаться как траектория в 2D-пространстве, наложенном на виртуальное окно джойстика.
Блок настроек логирования полностью аналогичен одноосной версии.
В нем можно настроить уровень подробности логгирования: не выводить ничего (None), выводить только ошибки (Error), ошибки и предупреждения (Error, Warning), ошибки, предупреждения и информационные сообщения (Error, Warning, Info) для каждого из источников: программа XILab, библиотека libximc и модуль скриптов Scripts.
При включенном автосохранении запись в файл производится каждые 5 секунд. Имя файла: «xilab_log_ГГГГ.ММ.ДД.csv», где ГГГГ, ММ и ДД - текущие год, месяц и день соответственно. Формат сохраненных данных: CSV.