4.1.3. Two axes system¶
4.1.3.1. Enclosure view¶
Two-axis controller model consists of two controller boards in a metal case. Case dimensions are 124 x 45 x 106 mm.
Front panel contains power supply connector, USB type-B connector, USB cascade connector, and power LED. The front panel also contains status LED, left and right limit switch LED, left and right movement buttons for each of the two controller boards of the two-axis system.
Rear panel contains stage connector for each of the two controller boards, supplementary two-axis system connector, and joystick connector.
Left side panel contains two Ethernet ports.
The USB type-A cascade connector and Ethernet connector is used to connect several two-axis cases in line terminated with either one-axis or two-axis controller. This way a required number of axes can be connected to the computer with a single cable.
4.1.3.2. Connectors¶
4.1.3.2.1. Stage connector¶
A female DSub 15-pin connector for stage is mounted on the controller board.
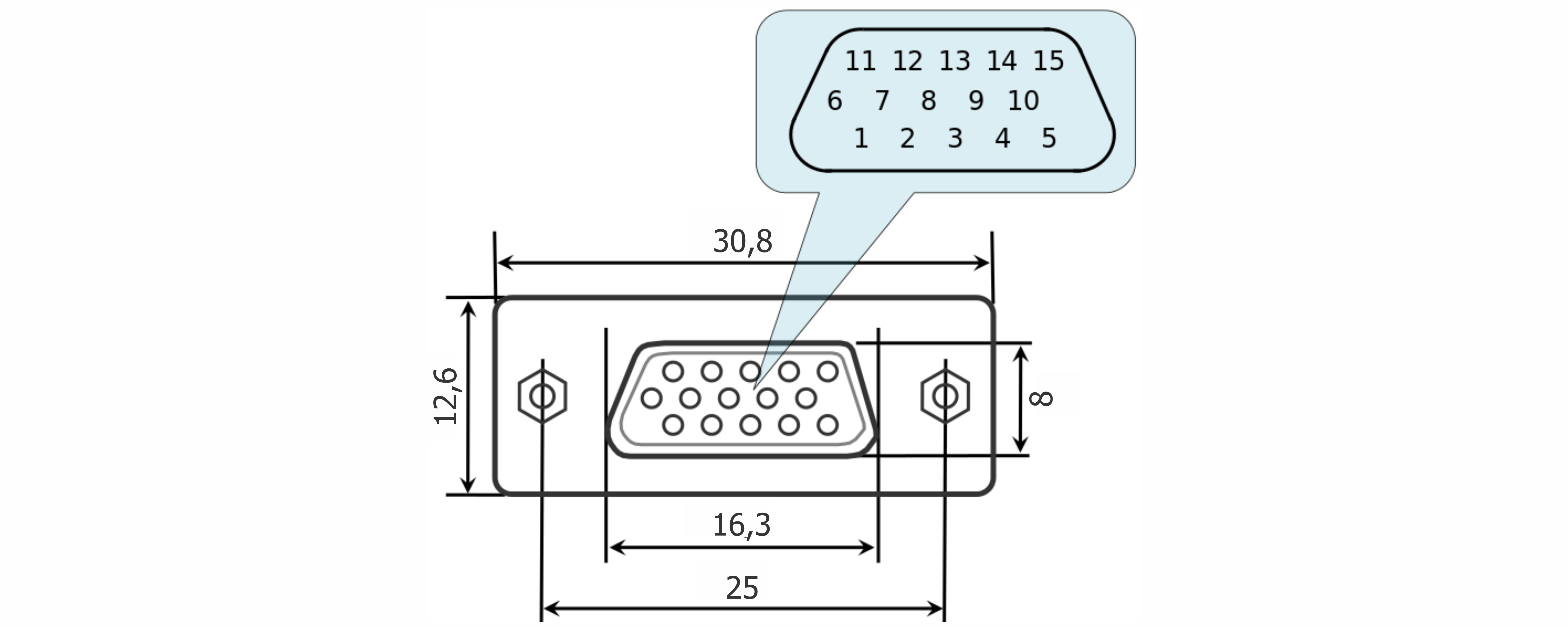
Dimensions and numbers of the pins in DSub connector (front view)
Pins functionality:
- Not phase B of SM or DC- of the motor
- Phase B of SM or DC+ of the motor or phase B on BLDC motor
- Not phase A of SM or DC- of the motor or phase C on BLDC motor
- Phase A of SM or DC+ of the motor or phase A on BLDC motor
- 5 V output, up to 500 mA - stabilized output for encoder power supply
- ID, one-wire interface for stage identification (only for Standa stages)
- Logic GND for limit switches, encoder, etc.
- 2nd limit switch
- 1st limit switch
- Encoder channel A
- Encoder channel B
- Revolution sensor input
- Inverted Encoder channel A
- Inverted Encoder channel B
- Inverted revolution sensor input
Note
Only firmwares 4.1.0 and newer support BLDC.
Note
Outputs 1 & 3 and 2 & 4 must be connected together for proper DC motor function if the nominal current of the motor is higher than 3A.
Warning
Plugging in/out the motor to the controller is not recommended while motor windings are under voltage.
4.1.3.2.2. Power supply connector¶
One and two-axis controller models use Kycon 4-pin DC power connector (part number KPPX-4P, www.kycon.com).

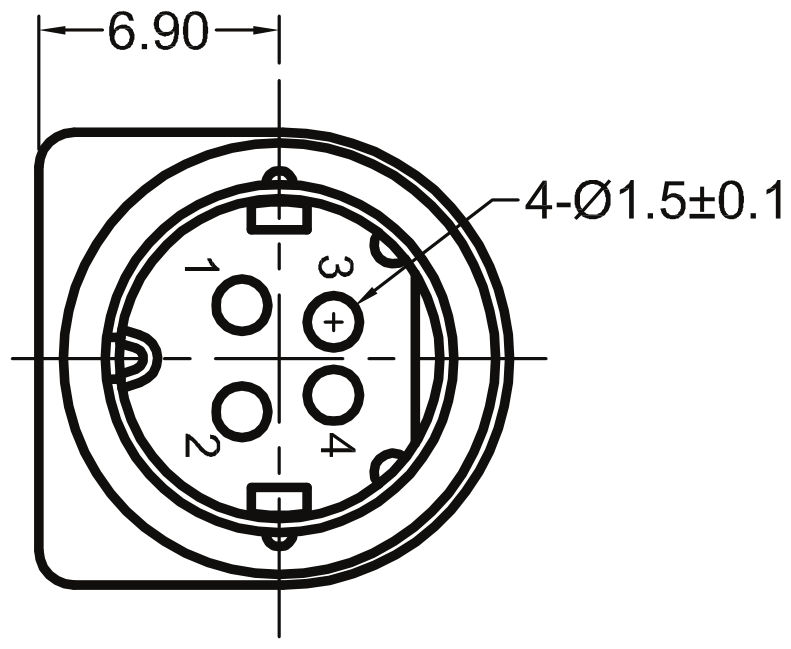
Pinout:
- Power, "-".
- Power, "+". 12-48V.
- Power, "-".
- Power, "+". 12-48V.
Important
Never supply the power to the controller and do not plug it to power connector if you are not confident that your power supply parameters conform to the requirements. Never attempt to plug the power supply to the controller if you are not sure power supply unit and controller connectors are compatible! The acceptable connection parameters are described in Safety instructions.
Important
Hot-swapping or unreliable connection of the power supply connector Kycon may damage the PC and/or the controller. For more details please refer to Safety instructions.
4.1.3.2.3. System control connectors¶
Controllers connect via connector USB type-B or Ethernet.

USB type-A - USB type-B cable
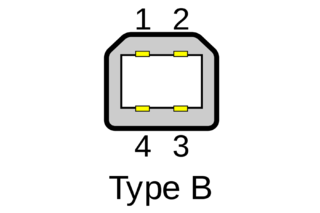
USB type-B connector
| Pin # | Name | Wire colour | Description |
|---|---|---|---|
| 1 | VCC | Red | +5 V DC |
| 2 | D- | White | Data - |
| 3 | D+ | Green | Data + |
| 4 | GND | Black | Ground |
Warning
Use verified USB cables only! Damaged or low-quality USB cable may cause improper controller operation, including motor rotation errors and errors of device recognition by PC operating system. Short cables with thick wires and screening are ideal for sustainable connection.
4.1.3.2.4. Joystick connector¶
A single-axis or two-axis controller model may contain a 9pin DSub male joystick connector.
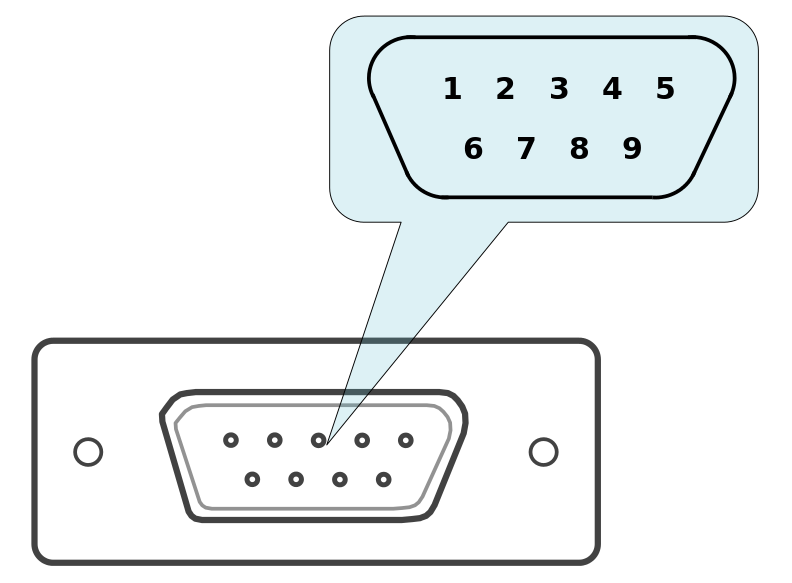
Pinout of the joystick connector, front view
Pinout:
- AXIS1_BUT_R, right button input, axis 1.
- AXIS2_Joy, analog 0-3.3 V, up to 200 mA joystick input, axis 2.
- DGND, common ground.
- AXIS2_BUT_R, right button input, axis 2.
- DGND, common ground.
- AXIS1_Joy, analog 0-3.3 V, up to 200 mA joystick input input, axis 1.
- 3.3 V output.
- AXIS1_BUT_L, left button input, axis 1.
- AXIS2_BUT_L, left button input, axis 2.
Note
If the connector belongs to a single-axis model, then pins 2, 4, 9 are not used.
Note
Unused pins of the internal connector do not require any additional connection or pullup/pulldown. Simply do not use them.
Important
Analog Joy, Pot inputs are designed to work with LESS THAN 3.3 V voltage. Over-voltage may break all analog controller inputs and lead to the controller or motor failure.
4.1.3.2.5. Supplementary two-axis system connector¶
Two-axis controller model contains a HDB-26 female DSub connector.
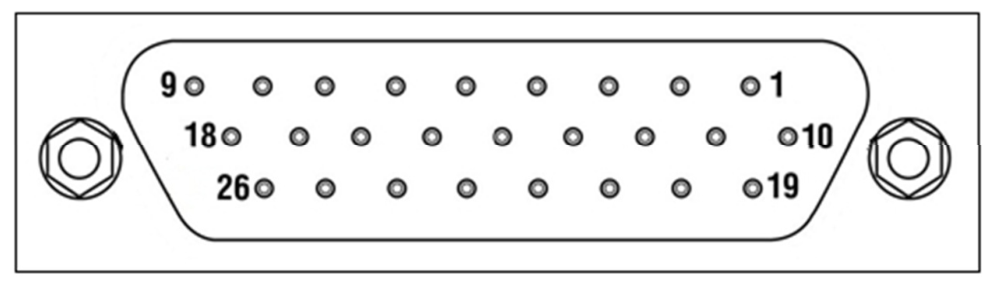
Pinout of the supplementary HDB-26 connector, front view
Pinout:
- AXIS_2_RX, serial port input for axis 2
- AXIS_2_SYNC_IN, synchronization input for axis 2
- AXIS_2_TX, serial port output for axis 2
- DGND, digital ground
- AXIS_2_SYNC_OUT, synchronization output for axis 2
- AXIS_1_SYNC_IN, synchronization input for axis 1
- AXIS_1_SYNC_OUT, synchronization output for axis 1
- AXIS_1_RX, serial port input for axis 1
- NC, not used
- AXIS_2_CLOCK, clock signal for the external driver, axis 2
- AXIS_2_POT, analog input for axis 2
- AXIS_2_EXTGPIO_0, input-output pin for axis 2
- AXIS_1_DIR_1, direction signal for the external driver for axis 1
- DGND, digital ground
- +5 V, up to 500 mA
- AXIS_1_EMBRAKE, brake control output for axis 1
- AXIS_1_CLOCK, clock signal for the external driver, axis 1
- AXIS_1_TX, serial port output for axis 1
- AXIS_2_DIR_1, direction signal for the external driver, axis 2
- AXIS_2_EMBRAKE, brake control output for axis 2
- AXIS_2_PBRK, magnetic brake output for axis 2
- PGND, power ground
- AXIS_1_PBRK, magnetic brake output for axis 1
- +5 V, up to 500 mA
- AXIS_1_EXTGPIO_0, input-output pin for axis 1
- AXIS_1_POT, analog input for axis 1