4.3.12. Usage of a coordinate correction table for more accurate positioning¶
If a shift without a linear encoder is used, the exact position will not always be in correspondence with the indications of the axis coordinates. This is due to the accuracy of the manufacture of mechanical parts, backlashes, temperature expansion. In this case, you can use the correction table for more accurate positioning.
Important
The table is individual for each motion. The table is formed by the manufacturer on a high-precision stand.
Principle of operation:
After certain distances, not necessarily equal, starting with 0, the real position of the motion is measured. The difference between the specified and the actual position is recorded into the table. Based on the obtained values, with the usage of linear interpolation, the coordinates are recalculated with the help of certain _calb functions. As a result when moving, manufacturing inaccuracies and other possible position deviations are compensated.
Example: Suppose the following correction table is set for the stage.
| X | 0 | 5 | 10 | 15 | 20 | 25 |
| dX | 0 | 0.05 | 0.02 | -0.003 | 0.01 | -0.04 |
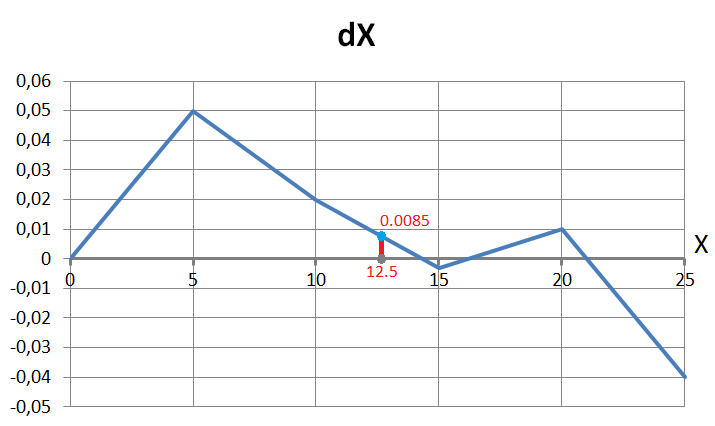
The graph shows the coordinate deviations corresponding to the table
In order to move to position 12.5, the coordinate must be set to 0.0085 greater and that is 12.5085. This is exactly what the algorithms of some _calb commands that use the correction table do.
You can load and clear the coordinate correction table table in XiLab on page User units settings.
To see a list of functions, structures, and parameters that are corrected with the correction table, follow library guide libximc.