5.3.13. Settings of PID control loops¶
In the Application settings Device -> PID control
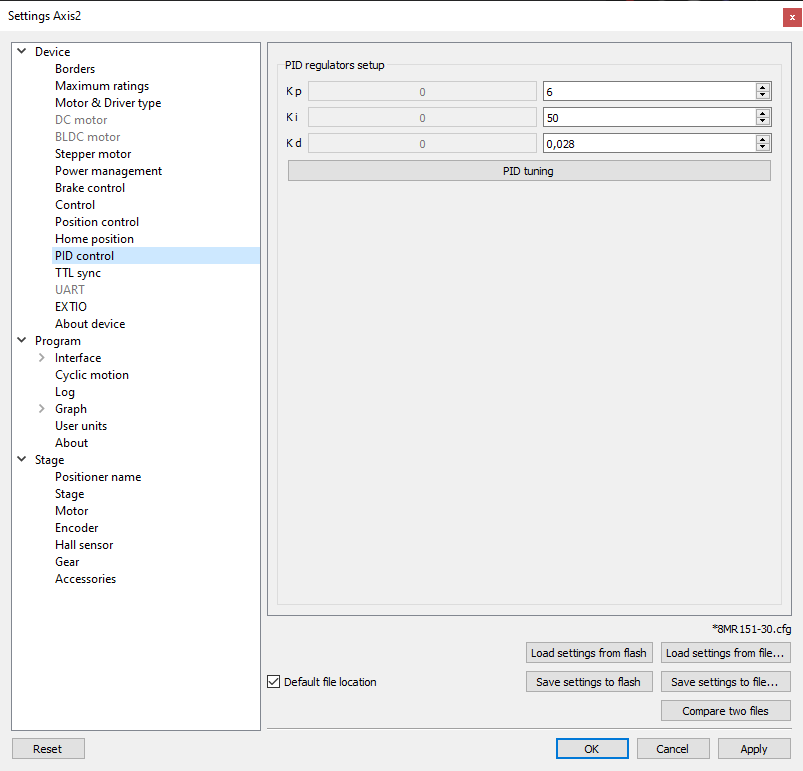
Settings of PID control loops window
In this section, you can change the PID coefficients. A voltage PID is used, \(K_p\), \(K_i\) and \(K_d\) coefficients can vary in 0..65535 range for DC motors.
Fractional PID coefficients (on right) are only for BLDC motor (supported in firmware 4.1.x and newer).
Warning
Do not change the settings of PID controllers, if you are not sure you know what you are doing!
Configuration commands are described in the Communication protocol specification. PID tuning is described in detail in the PID-algorithm for DC engine control and the PID-algorithm for BLDC engine control.