5.3.15. Settings of kinematics (BLDC motor)¶
In the Application settings Device -> BLDC Motor
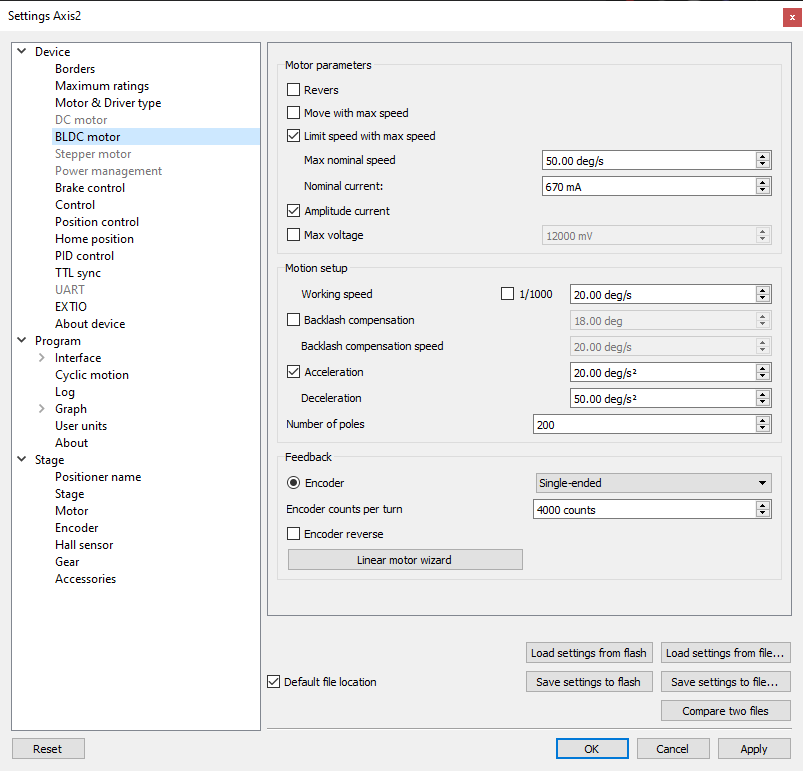
Settings of kinematics (DC motor) window
Important
Only firmwares 4.1.x (and newer) support BLDC control.
Note
Oscillatory movements may occur when the controller is turned on and the positioner moves for the first time. This is normal behavior due to the fact that the controller initially does not know the current position of the positioner, since it does not support Hall sensors or an absolute encoder. After the first movement, the controller determines the position, and it will operate stably without oscillations until the next power-off.
5.3.15.1. Motor parameters - electric motor settings¶
Revers - checking this flag associate the motor rotation direction with the current position counting direction. Change the status of the flag if positive motor rotation decreases the value on the position counter register. This flag effect is similar to connecting the motor winding to reverse polarity.
Move with max speed - if this flag is checked motor ignores the preset speed and rotates at the maximum speed limit.
Limit speed with max speed - if this flag is checked the controller limits the maximum speed to the number of steps per second, specified in the Max nominal speed field.
Max nominal speed, Max voltage - are motor nominal parameters. If they are active and applicable for given type of motor, the controller limits these parameters within the specified values. For example, if the motor speed and current exceeds the nominal values, the controller will reduce output action until both values are within the normal range. However, the controller remains in operational condition, and will execute the current task.
Important
“Max voltage” is the maximum voltage between any two terminals of the BLDC motor. At the same time, the voltage at each terminal relative to the controller’s ground (this voltage is shown on the graphs “Winding A Voltage”, “Winding B Voltage”) may exceed “Max voltage”.
Amplitude current - if this flag is checked engine current value is interpreted as maximum amplitude value. If the flag is unset, then engine current value is interpreted as the current value calculated from the maximum heat dissipation. See Calculation of the nominal current page for description
5.3.15.3. Feedback settings¶
Encoder - use of encoder as a feedback sensor. The following encoder types are available: Single-ended, Differential or Autodetect.
Encoder counts per turn - this parameter defines the number of encoder pulses per one motor axis full rotation.
Linear motor wizard - open dialog for setting linear stages parameters.