5.3.8. Position control¶
In the Application settings Device -> Position control
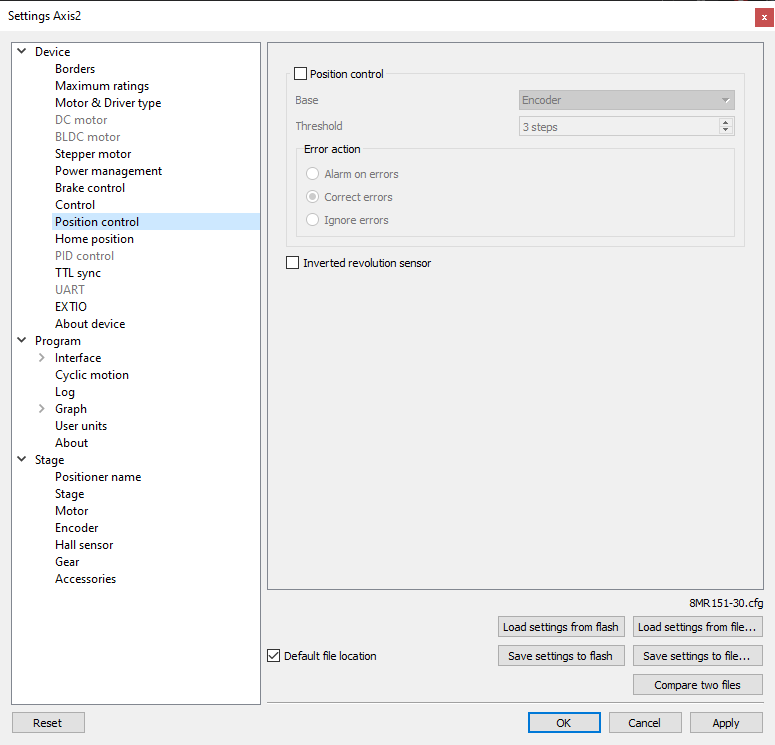
Window of Position control
Check the Position control checkbox to activate the position control.
Base - selection of the position control device. You can select an encoder (see Operation with encoders) or revolution sensor in the drop-down list.
Threshold - determines the number of missed steps (0 .. 255), which is considered to be an error. If the amount of missed steps exceeds the specified number of steps the SLIP error flag is set. Further actions depend on the Error action setting:
If Alarm on errors is active then the controller will enter Alarm state.
If Correct errors is active then the controller will try to correct slip error (see Steps loss detection).
If Ignore errors is active then the controller will do nothing.
Inverted revolution sensor - if the flag is checked the revolution sensor is triggered by the level 1. Unchecked flag means usual logic is valid - 0 is the trigger/activation/active state.
Configuration commands are described in the Communication protocol specification.
Important
- Feedback none: in this mode, “Position control” is useful and should be used. “Position control” compares the position by the encoder/position sensor and recalculates it in steps. If there is a discrepancy between positions, a moving indicator “SLIP” will light up in the bottom of XiLab main window. In addition, if “Alarm on errors” is marked, the controller will enter an alarm state.
- Feedback encoder: “Position control” does not need to be used because the position is strictly controlled by the encoder.
- Feedback EMF: the algorithm should not be used with the “Position Control” flag enabled. For smooth running in the EMF algorithm, a discrepancy between the actual position and the profile position is implemented. If “Position Control” flag is enabled, false Alarms may be triggered.
- Feedback encoder mediated: it is not recommended to enable the “Position Control” flag. While driving, the algorithm does not differ from the “none” mode, but when the engine arrives at a position, the actual position is compared to the desired position on the encoder, after which the algorithm compensates for the discrepancy in positions until the position on the encoder becomes desirable. Thus, if the “Position Control” flag is enabled, the SLIP flag and Alarms can be triggered.