5.3.9. Settings of external control devices¶
In the Application settings Device -> Control
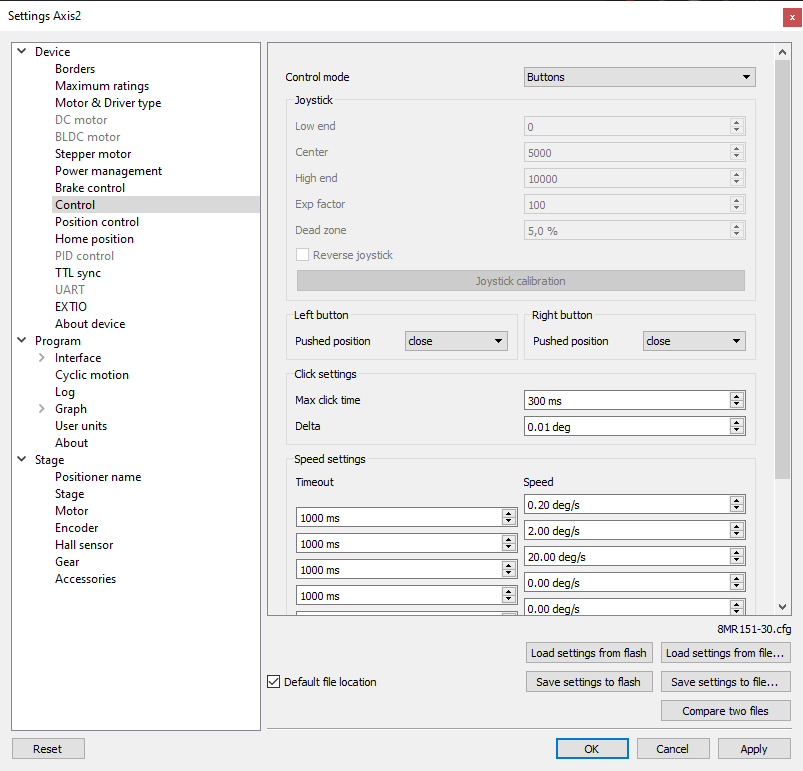
Settings of external control devices window
Control mode - range of external motor control devices.
- Control disabled - external devices are not used
- Joystick - joystick is used
- Buttons - buttons are used
Important
In Joystick control mode, the physical and virtual buttons remain in working order.
In joystick mode, the physical buttons control only the speed of movement. That is, if you have rejected the joystick,
removing it from the deadzone, and hold it in this position, then you can use the buttons to increase or decrease the motor speed.
Joystick block contains joystick settings.
Low end, Center and High end determine the lower border, the middle and the upper border of joystick range respectively. Hence the joystick ADC normalized value equal to or less than Low end corresponds to the maximum joystick deflection towards lower values.
Exp factor - exponential nonlinearity parameter. See Joystick control.
Dead zone - dead zone of joystick deviation from the center position. Minimum step of variation: 0.1, the maximum value is 25.5. The joystick deviation from Center position by less than Dead zone value corresponds to zero speed.
Reverse joystick - reverse the joystick effects. Joystick deviation to large values results in negative speed and vice versa.
Button Joystick calibration opens calibration dialog box.
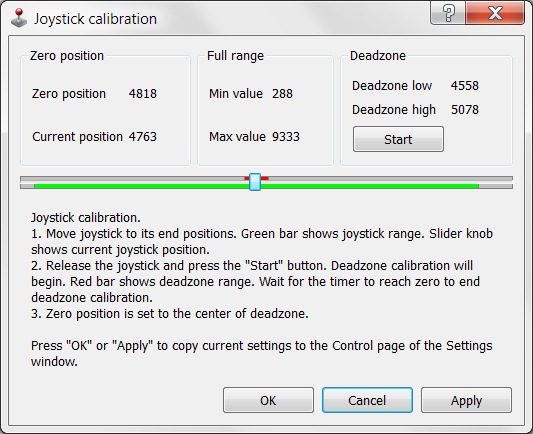
Dialog box of Joystick Calibration
Calibration is automatic border and the dead zone detection. Below is the process description:
Move the joystick to extremes to determine the borders. The range of all measured values is represented in a green line.
Release the joystick and press the Start to initiate detection of the dead zone. Within 5 seconds imitate accidental influences on the joystick, which should not be recognized as deviation from the joystick zero position. The dead zone range is represented in red.
Pressing the Apply button will send the computed values into the Settings window. Pressing OK button will send the values and close the calibration dialog box.
Additional Deadzone Check After Calibration
After completing automatic joystick calibration and clicking the OK button, XILab performs an additional check of the calculated deadzone value.
- If the calculated deadzone value is greater than 10%, it is accepted without changes, and the procedure is completed.
- If the deadzone value is less than 10%, an additional window opens, prompting the user to choose one of the following options:
- Recommended deadzone value for 1-axis systems is 5%. This range reliably covers:
- electrical noises;
- mechanical vibrations;
- weak unintentional touches;
- joystick parameters change over time.
- Recommended deadzone value for two axes systems is 10%. This range reliably covers unintentional joystick deflations in orthogonal direction. For example unintentional Y deflection during desired pure X deflection.
- Retain the deadzone value determined during automatic calibration.
- Recommended deadzone value for 1-axis systems is 5%. This range reliably covers:
This additional verification helps avoid setting a deadzone that is too small, which could lead to unwanted motor movement due to electrical noise, mechanical vibrations, or slight accidental joystick touches.
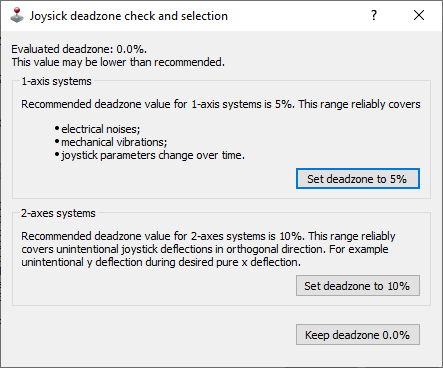
Dialog box of Joystick deadzone check and selection
Left button and Right button blocks contain the settings of the physical buttons.
Pushed Position - determines the state (pressed or released button) which is considered the motion signal by the controller.
- Open - released button is considered to be a motion command.
- Close - depressed button is considered to be a motion command.
Click settings block lets one to set up button “click” behaviour. A rapid press of a button is interpreted as a “click”.
Max click time - maximum click time. Until this amount of time is elapsed controller will not start moving with first speed (see below).
Delta - relative position offset. Controller will do a shift on offset with each click.
Speed settings block contains timeout and speed settings.
Timeout [i] - the time after which the speed switches from Speed[i] to Speed[i+1]. If any of the Timeout[i] is equal to zero, no switching to the next speeds will occur.
Speed[i] - speed of the motor after time equal to Timeout[i-1]. If any of the speeds is equal to zero, no switching to this and subsequent speeds will occur.
Configuration commands are described in Communication protocol specification.