4.1.2. Одноосная система¶
Одноосная версия контроллера представляет собой плату контроллера в металлическом корпусе. Размеры корпуса: 124 x 68 x 48,5 мм.
На передней панели расположен разъем силового питания, разъём для подключения к компьютеру тип USB type-B , светодиоды «стасус контроллера», «питание», «левый концевик», «правый концевик», кнопки для движения вправо и влево.
На задней панели расположен разъем подключения позиционера.
Левая боковая панель содержит два Ethernet порта.
4.1.2.1. Разъёмы¶
4.1.2.1.1. Разъем подключения позиционера¶
Для подключения позиционера используется разъем DSub 15 типа «мама».
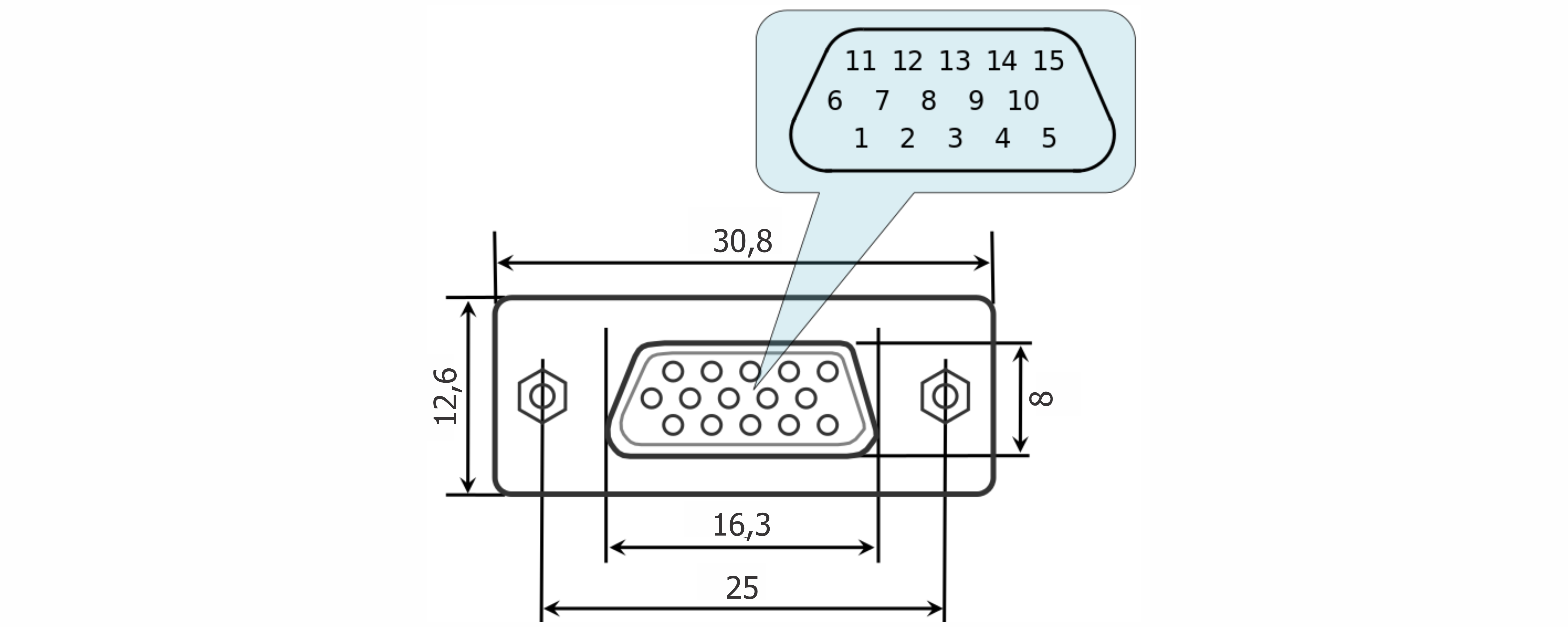
Размеры и нумерация выводов в разъеме DSub, вид спереди
Назначение выводов:
- ШД фаза не В или -DC мотора
- ШД фаза В или +DC мотора или фаза B BLDC мотора
- ШД фаза не А или -DC мотора или фаза C BLDC мотора
- ШД фаза А или +DC мотора или фаза А BLDC мотора
- Выход 5 В, до 500 мА, стабилизированный выход для питания энкодера
- ID, однопроводной интерфейс опознавания подвижки (работает только с позиционерами Standa)
- Земля логическая для концевиков, энкодера и прочего
- Концевик №2
- Концевик №1
- Энкодер А
- Энкодер В
- Вход датчика оборотов
- Инверсный канал энкодера А
- Инверсный канал энкодера В
- Инверсный вход датчика оборотов
Примечание
BLDC моторы поддерживаются в прошивке версий 4.1.0 и новее.
Примечание
Для подключения DC мотора с рабочим током выше 3А нужно соединить выходы 1 и 3, а также выходы 2 и 4.
Предупреждение
Не рекомендуется присоединять к/отсоединять от контроллера двигатель пока есть питание на обмотках мотора.
4.1.2.1.2. Разъем силового питания для 1- и 2-осных систем¶
Одноосные и двухосные системы, поставляемые в корпусе, используют разъём Kycon 4-pin DC power (part number по каталогу KPPX-4P, www.kycon.com).

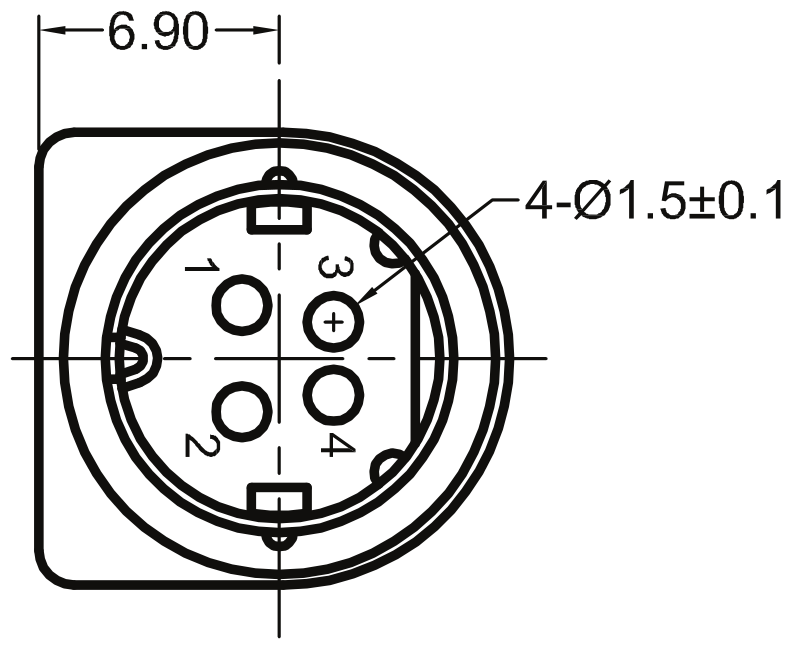
Назначение выводов:
- Силовое питание, \«-\».
- Силовое питание, \«+\». 12-48В.
- Силовое питание, \«-\».
- Силовое питание, \«+\». 12-48В.
Важно
Никогда не подавайте электропитание на контроллер и не подключайтесь к разъему силового электропитания, если вы не уверены, что параметры вашего блока питания соответствуют требуемым. Не пытайтесь подключить электропитание к контроллеру если не уверены, что разъемы на блоке питания и на корпусе контроллера совместимы друг с другом! Допустимые параметры подключения указаны в разделе Техника безопасности.
Важно
Горячее присоединение/отсоединение, а также ненадежное подсоединение силового питания через разъём типа Kycon может вывести из строя контроллер и/или компьютер. Подробнее смотрите в разделе Техника безопасности.
4.1.2.1.3. Разъемы управления системой¶
Контроллеры подключаются через разъём USB type-B или Ethernet.

Кабель USB type-A - USB type-B
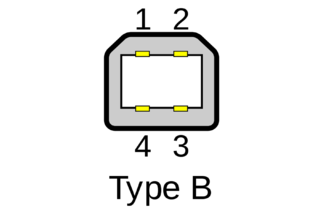
Разъем USB type-B
| Номер вывода | Название | Цвет кабеля | Описание |
|---|---|---|---|
| 1 | VCC | Красный | +5 В DC |
| 2 | D- | Белый | Data - |
| 3 | D+ | Зеленый | Data + |
| 4 | GND | Черный | Земля |
Предупреждение
Используйте только проверенные и заведомо работоспособные USB-кабели! Неисправный или некачественный USB кабель может стать причиной неправильной работы контроллера, в том числе ошибок при вращении мотором или при опознавании устройства операционной системой. Для стабильного соединения используйте короткие кабели с толстыми проводниками и экранировкой.
4.1.2.1.4. Дополнительный разъем одноосных систем¶
На корпусе одноосной системы расположен порт HDB-26 типа «мама».
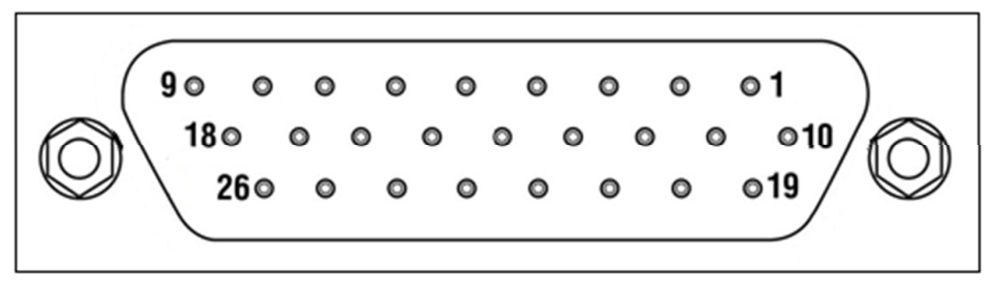
Нумерация выводов в разъеме HDB-26, вид спереди
Назначение выводов:
- NC, не используется
- NC, не используется
- NC, не используется
- Цифровая земля для логики 3.3 В и 5 В
- NC, не используется
- SYNC_IN, вход синхронизации, 3.3 В логика
- SYNC_OUT, выход синхронизации, 3.3 В логика
- RX, вход последовательного порта, 3.3 В логика
- NC, не используется
- NC, не используется
- NC, не используется
- NC, не используется
- DIR, сигнал direction для управления внешним драйвером, 3.3 В логика
- Цифровая земля для логики 3.3 В и 5 В
- +5 В выход, до 500 мА
- EMBRAKE, выход для управления электромагнитным тормозом, 3.3 В логика
- CLOCK, сигнал сlock для управления внешним драйвером, 3.3 В логика
- TX, вход последовательного порта, 3.3 В логика
- NC, не используется
- NC, не используется
- NC, не используется
- Силовая земля 12-48 В
- PBRK, выход магнитного тормоза, 24 В, до 500 мА
- +5 В выход, до 500 мА
- EXTGPIO_0, вход-выход общего назначения, 3.3 В логика
- POT, аналоговый вход 0-3.3 В общего назначения