5.2.2. Главное окно программы XILab в режиме управления одной осью¶
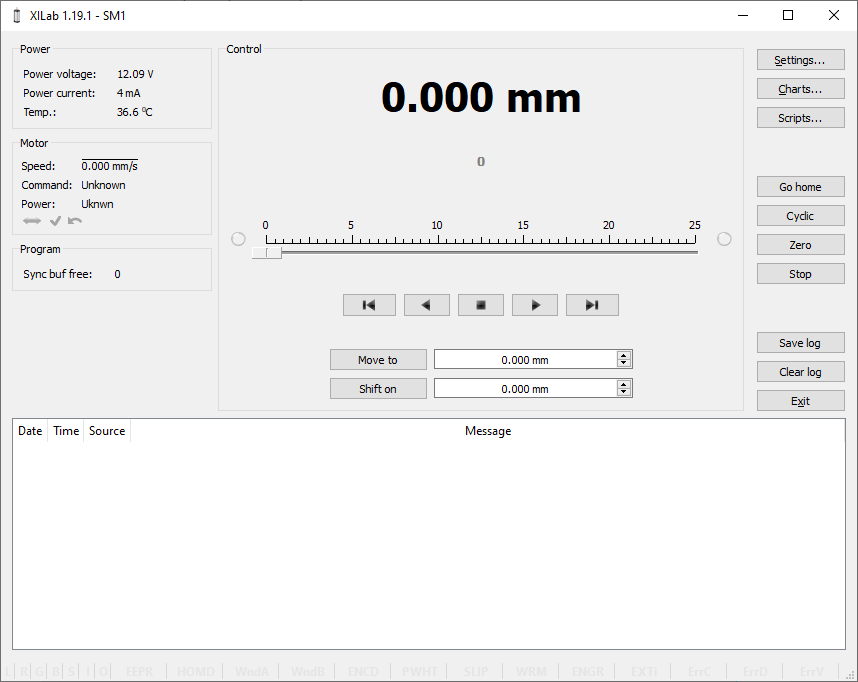
Главное окно программы XILab в режиме двигателя
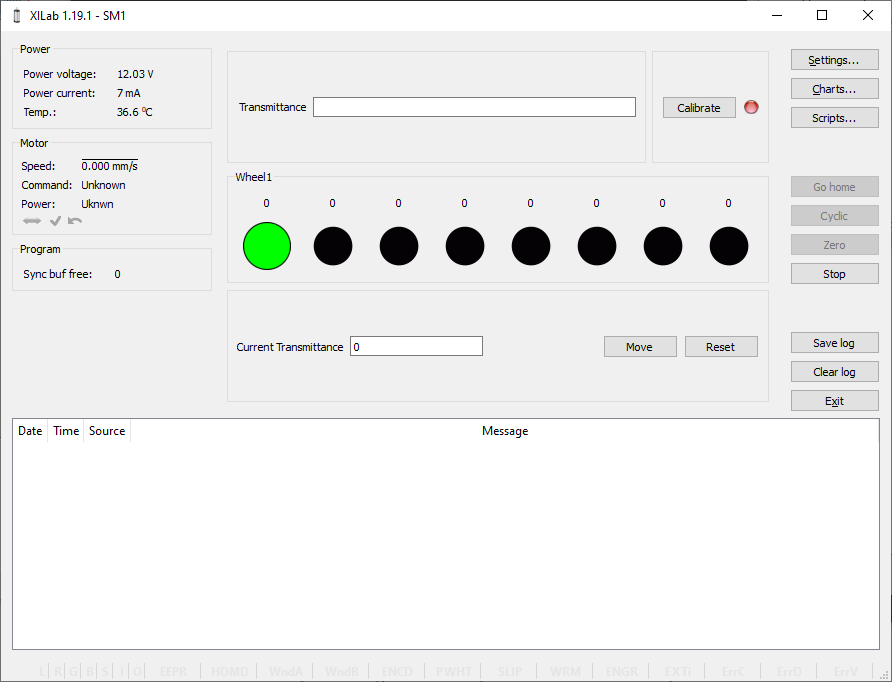
Главное окно программы XILab в режиме аттенюатора
В левой части окна в группах параметров Power и Motor находятся данные о состоянии контроллера и мотора в настоящий момент. В центральной части окна расположен блок Control, содержащий индикаторы текущей позиции и элементы управления движением мотора. Блок Control в зависимости от настроек может принимать вид блока управления движением произвольного двигателя или блока управления аттенюатором. Справа расположена группа кнопок для управления программой в целом. Внизу расположен лог, при минимальном размере окна он скрыт. Под логом находится статусная строка. Рассмотрим эти группы более подробно.
5.2.2.1. Блок управления движением двигателя¶
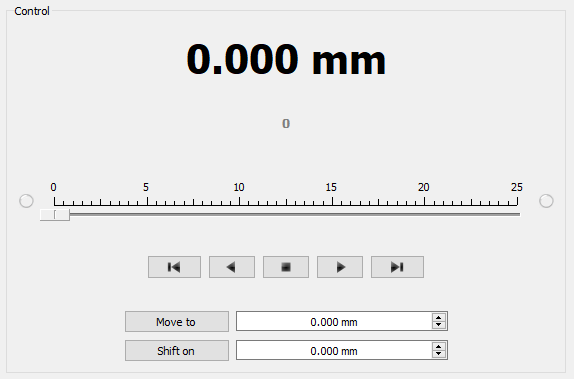
Блок Control
В центральной части блока расположен индикатор текущей позиции, под ним, если энкодер включен, располагается индикатор позиции по энкодеру. В режиме ведущего энкодера, см. раздел Работа с энкодерами главный и второстепенный индикаторы меняются местами.
Ниже расположен блок Control, содержащий элементы управления движением мотора. Рассмотрим их более подробно:
5.2.2.1.1. Движение без точного задания конечного положения¶

Кнопки управления движением
- Кнопки Влево, Стоп и Вправо запускают движение влево без указания конечной позиции, останавливают с замедлением начатое движение и запускают движение вправо без указания конечной позиции, соответственно.
- Кнопка Влево до границы заставит мотор вращаться до левой границы слайдера. Вправо до границы, соответственно, до правой границы слайдера.
- Нажатие и удержание кнопок клавиатуры Вправо, Влево при нахождении фокуса ввода в блоке слайдера начинает движение в направлении увеличения или уменьшения координаты. При отпускании кнопки движение прекращается, как будто была нажата кнопка Стоп на главном окне.
5.2.2.1.2. Движение в заданную точку¶

Управление движением в заданную точку
- Кнопка Move to запускает процесс перемещения в заданную позицию.
- Кнопка Shift on запускает процесс смещения на заданное расстояние от текущей позиции.
5.2.2.1.3. Текущая позиция для команд движения¶
Команды Move to и Shift on использую текущую позицию для расчета движения. Текущая позиция изменяется следующими командами:
Команды Stop, Влево, Вправо, Влево до границы и Вправо до границы не изменяют текущую позицию.
5.2.2.2. Блок управления аттенюатором¶
Блок управления аттенюатором
В верхней части блока расположено окно Transmittance и кнопка Calibrate. Окно Transmittance предназначено для выбора желаемого коэффициента пропускания. Кнопка Calibrate предназначена для ручного поиска начальной позиции аттенюатора и при нажатии запускает сначала движение на один оборот аттенюатора с текущими настройками для однозначного определения относительного положения дисков аттенюатора, а затем функцию Автокалибровка домашней позиции. Нажатие Calibrate не является необходимым для движения - в случае если аттенюатор не производил калибровку или калибровка была сброшена, к примеру нажатием Cancel в процессе движения, при следующем движении калибровка будет сделана автоматически.
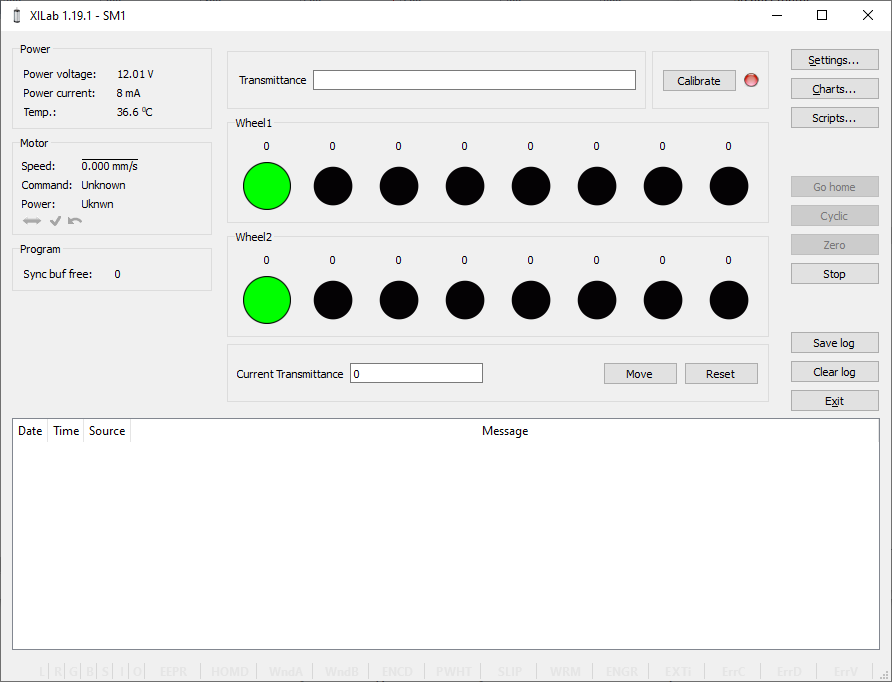
Аттенюатор может работать с одним или двумя дисками (у каждого диска имеется 8 фильтров), поэтому ниже будет находиться одно или два поля, соответствующие одному или двум дискам. Далее располагается окно Current Transmittance, в котором показывается коэффициент пропускания (который группируется из коэффициентов пропускания имеющихся фильтров), наиболее близкий к желаемому.
При нажатии на кнопку Move происходит движение к тем фильтрам, которые соответствуют Current Transmittance, причем данные фильтры подсвечиваются зеленым цветом, т.е делаются активными.
Нажатие на кнопку Reset делает все фильтры неактивными (становятся серого цвета).
5.2.2.3. Состояние контроллера и мотора¶
5.2.2.3.1. Электропитание контроллера¶
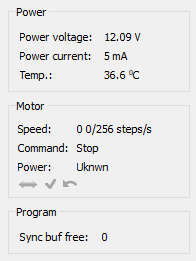
Группа параметров Power содержит индикаторы:
- Power voltage - напряжение на силовой части.
- Power current - ток потребления силовой части.
- Temp. - температура процессора контроллера.
Изменение цвета индикатора Power voltage на красный показывает выход за рамки диапазона допустимых значений напряжения источника питания относительно разрешенного. В этом случае контроллер переходит в состояние Alarm. Вы можете изменить этот параметр в разделе Настройка предельных параметров контроллера.
Появление горизонтальной черты над индикатором Power voltage означает, что напряжение питания контроллера превышает максимальное напряжение двигателя, Вы можете изменить этот параметр в разделе Настройка кинематики движения (DC мотор).
Изменение цвета индикатора Power current на красный показывает превышение тока, потребляемого контроллером от источника питания, относительно разрешенного. В этом случае контроллер переходит в состояние Alarm. Вы можете изменить этот параметр в разделе Настройка предельных параметров контроллера.
Появление горизонтальной черты над индикатором Power current означает, что ток, потребляемый контроллером, превышает максимальный ток двигателя, этот параметр можно изменить в разделе Настройка кинематики движения (DC мотор).
Изменение цвета индикатора Temp на красный показывает превышение температуры на плате контроллера относительно разрешенной. В этом случае контроллер переходит в состояние Alarm. Параметр можно изменить в разделе Настройка предельных параметров контроллера.
Важно
Выход из состояния Alarm возможен после прекращения событий, вызвавших Alarm, при условии, что флаг Sticky Alarm не установлен. Если флаг Sticky Alarm установлен , используйте кнопку «STOP» , чтобы выйти из состояния тревоги.
5.2.2.3.2. Состояние мотора¶
Группа параметров Motor содержит индикаторы:
- Speed - скорость вращения мотора.
- Command - последняя выполняемая (жирный шрифт) или выполненная (обычный шрифт) команда контроллера. Команда контроллера отображается черным цветом, если флаг ошибки движения MVCMD_ERROR не установлен, в противном случае красным. Может быть одним из следующих вариантов:
- Move to position - перемещение в заданную позицию
- Shift on offset - смещение на заданное расстояние
- Move left - движение влево
- Move right - движение вправо
- Stop - остановка
- Homing - нахождение начальной позиции
- Loft - компенсация люфта
- Soft stop - плавная остановка
- Unknown - неизвестная команда (возможно сразу после включения контроллера)
- Power - состояние питания шагового двигателя. Может быть одним из следующих вариантов:
- Off - обмотки мотора разомкнуты и не управляются драйвером,,
- Short - обмотки замкнуты накоротко через драйвер,
- Norm - обмотки запитаны номинальным током,
- Reduc - обмотки намеренно запитаны уменьшенным током от рабочего для снижения потребляемой мощности,
- Max - обмотки запитаны максимально доступным током, который может выдать схема при данном напряжении питания.
Примечание
GPIO флаг можно использовать для обнаружения подключенного двигателя
Появление горизонтальной черты над индикатором Speed означает, что достигнута максимальная скорость движения, установленная в поле Max nominal speed настроек мотора Настройка кинематики движения (DC мотор).
5.2.2.3.3. Состояние программы¶
Группа параметров Program содержит индикаторы:
- Sync buf free - количество свободных ячеек в буфере команд контроллера (на данный момент эта функция отключена).
5.2.2.4. Группа кнопок для управления программой¶
- Кнопка Settings… открывает настройки контроллера, см. раздел Настройки программы.
- Кнопка Chart… открывает окно с графиками, см. раздел Графики.
- Кнопка Scripting… открывает окно работы со скриптами, см. раздел Скрипты.
- Кнопка Go home осуществляет поиск начальной позиции, см. раздел Настройка исходного положения.
- Кнопка Cyclic включает режим циклического движения, см. раздел Настройка режима циклического движения.
Примечание
Команда Cyclic является составной командой: при вызове Cyclic в XiLab на уровне контроллера производится выполнение последовательности из команд Move to.
- Кнопка Zero обнуляет текущую позицию мотора и значение энкодера.
- Кнопка Stop посылает команду немедленной остановки, сбрасывает состояние Alarm, очищает буфер команд для синхронного движения и останавливает выполнение скрипта, если он запущен.
- Кнопка Save log сохраняет содержимое лога в файл в формате CSV (открывается диалог выбора файла для записи).
- Кнопка Clear log очищает содержимое лога.
- Кнопка Exit осуществляет корректное завершение работы, см. раздел Корректное завершение работы.
5.2.2.5. Статусная строка¶
В статусной строке находятся индикаторы текущего состояния контроллера. Слева направо это блок 7 флагов,
- L - Левая кнопка нажата
- R - Правая кнопка нажата
- G - Вход/выход GPIO активен
- B - Магнитный тормоз запитан
- S - Датчик оборотов активен
- I - Вход синхронизации активен
- O - Выход синхронизации активен
и отдельные индикаторы (флаги)
- EEPR - Загорается зеленым цветом, когда подвижка оснащена микросхемой памяти EEPROM.|br| Встроенный профиль подвижки загружается из микросхемы памяти EEPROM, при условии, что установлен флаг EEPROM_PRECEDENCE (XILab Settings->About device tab), что позволяет подключать различные подвижки к контроллеру с автоматической настройкой.
- HOMD - Загорается после успешного выполнения команды home (), что означает, что шкала относительного положения откалибрована с помощью аппаратного датчика абсолютного положения, такого как концевой выключатель.
- WndA/WndB имеет 1 из 4 состояний:
- Обмотка A/B отключена.
- Состояние обмотки A/B неизвестно.
- Обмотка A/B закорочена.
- Обмотка A/B подключена и работает исправно.
Важно
Статус определяется использованием статистических данных во время перемещения, что отнимает занимает время и делает этот статус довольно бесполезным в обычных приложениях. Поэтому в данный момент эта функция отключена.
- ENCD - Состояние энкодера имеет 1 из 5 состояний:
- Энкодера отсутствует.
- Состояние энкодера неизвестно.
- Энкодер подключен и неисправен.
- Энкодер подключен и работает, но считает в другом направлении.
- Энкодер подключен и работает исправно. - PWHT - Перегрев силового драйвера.
Управление двигателем отключено до восстановления рабочей температуры драйвера. Этого не должно происходить в коробочных версиях контроллера. Это может произойти в версии контроллера с «голой» платой и с пользовательским радиатором. Решение: используйте другой радиатор. - SLIP - Обнаружено проскальзывание мотора.
Флаг устанавливается, когда положение энкодера и положение шага слишком далеки друг от друга. Вы можете отключить флаг «Position control» или увеличить ошибку в поле «threshold» на вкладке «XILab Settings->Position control», чтобы предотвратить возникновение этой ошибки.
- WRM - Загорается при существенной разнице между сопротивлениями обмоток шагового двигателя.
Обычно это происходит с поврежденным шаговым двигателем у которого полностью или частично закорочены обмотки. Вы можете диагностировать проблему согласно инструкциям в нашем руководстве.
Важно
WRM алгоритм изначально не был рассчитан на использование для подвижек с ременной передачей (например, 8MRB450-350 или 8MRB240-152) из-за того что ремень может растягиваться и вибрировать. Вибрация, как правило, происходит на высоких скоростях, что и сбивает работу WRM алгоритма. Для подвижек ременной передачи это нормальное поведение
- ENGR - Загорается красным при возникновении ошибки управления мотором.
Отказ алгоритма управления мотором означает, что он не может определить правильное решение с помощью полученных данных обратной связи. Единичный отказ может быть вызван механической проблемой. Повторяющийся сбой может быть вызван неправильной настройкой мотора. - EXTI - Ошибка вызвана игнорированием внешнего сигнала EXTIO, этой ошибкой можно управлять в настройках (XILab Settings->EXTIO tab)
- ErrC - обнаружена ошибка команды.
Полученная команда отсутствует в списке известных команд контроллера. Наиболее вероятная причина - устаревшая прошивка, которую можно обновить в настройках XILab ->вкладка About device ->кнопка Autoupdate. - ErrD - обнаружена ошибка целостности данных.
Данные внутри команды и ее код CRC не соответствуют, поэтому данные не могут считаться действительными. Эта ошибка может быть вызвана EMI в интерфейсе UART/RS232. - ErrV - обнаружена ошибка значения.
Значения в команде не могут быть применены без корректировки, потому что они выходят за допустимый диапазон. Вместо исходных значений использовались исправленные. - Ctbl - Статус загрузки корректирующей таблицы. Флаг загорается зеленым, когда для позиционера была загружена и применена корректирующая таблица.