5.3.5. Настройка исходного положения¶
В окне настроек программы Device -> Home position
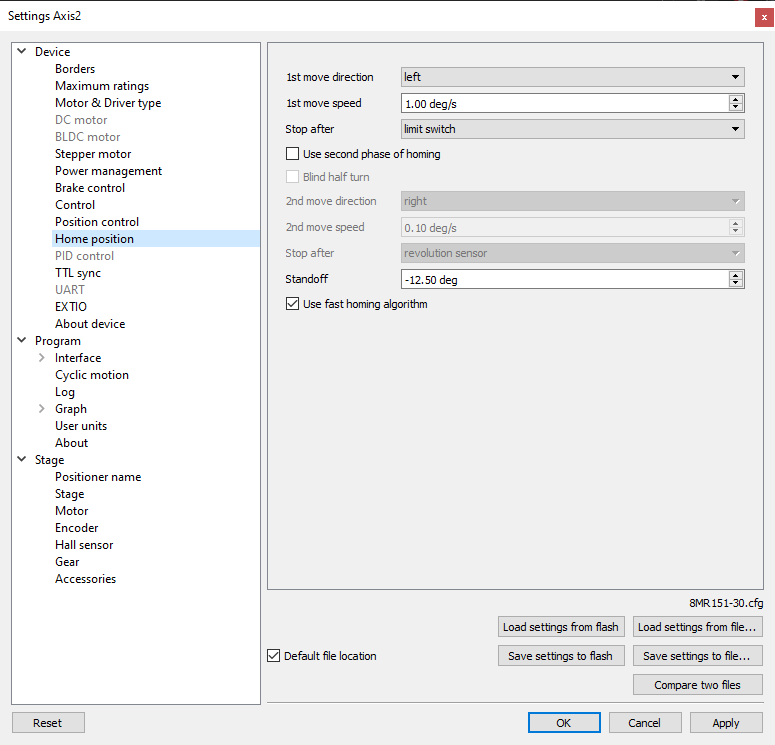
Окно настроек исходного положения
Вкладка Home position устанавливает параметры калибровки исходного положения позиционера.
- 1st move direction - задает направление движения мотора для поиска сигнала остановки (вправо или влево) для стандартного и быстрого алгоритмов автокалибровки.
- 1st move speed - задает скорость движения для первой фазы стандартного алгоритма калибровки и второй фазы быстрого алгоритма.
- Stop after - задает источник сигнала остановки (концевой выключатель, датчик оборотов или внешний импульс синхронизации).
- Use second phase of homing - установка этого флага включает точную докалибровку домашней позиции (вторую фазу стандартного алгоритма калибровки).
- Blind half turn - при установленном флаге мотор игнорирует сигнал об окончании второй фазы калибровки в течение половины оборота. Это сделано для того, чтобы можно было задать однозначный порядок обнаружения датчиков, по которым происходит окончание первой и второй фазы калибровки, в случае, когда эти датчики расположены достаточно близко друг от друга.
- 2nd move direction - задает направление движения мотора для поиска сигнала остановки (вправо или влево) для второй фазы стандартного алгоритма калибровки.
- 2nd move speed - задает скорость движения для второй фазы стандартного алгоритма калибровки.
- Stop after (в блоке настроек для второй фазы калибровки) - задает источник сигнала остановки (концевой выключатель, датчик оборотов или внешний импульс синхронизации). Источник сигнала может отличаться от используемого для первой фазы калибровки.
- Standoff - задает отступ для финального смещения от реперной точки. Направление смещения задается знаком числового значения отступа (положительный отступ означает смещение вправо, отрицательный - влево).
- Use fast homing algorithm - этот флаг включает быстрый алгоритм автокалибровки для ускорения процесса поиска исходного положения.