5.3.1. Настройка кинематики движения (Шаговый двигатель)¶
В окне Настройки программы Device -> Stepper motor
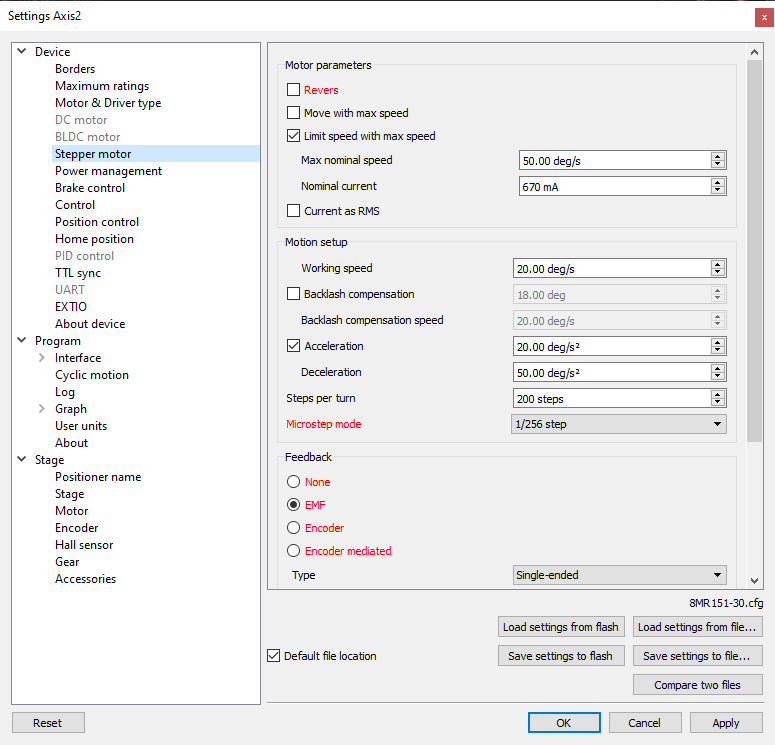
Окно настроек кинематики движения шагового двигателя
5.3.1.2. Motion setup - настройки, связанные с кинематикой движения¶
Working speed - скорость движения.
Backlash compensation - компенсация люфта. Так как механика позиционера не идеальна, существует различие при подходе к заданной точке справа и слева. При включенном режиме компенсации люфта позиционер будет подходить к точке всегда с одной стороны. Установленное значение определяет количество шагов, на которое позиционер будет проходить заданную точку чтобы возвращаться к ней с одной и той же стороны. Если указанное число больше нуля, позиционер будет подходить к точке всегда справа. Если меньше нуля, то всегда слева.
Backlash compensation speed - скорость компенсации люфта. При включенном режиме компенсации люфта Backlash compensation позиционер будет подходить к точке справа или слева с установленной скоростью, определяемой количеством шагов в секунду.
Acceleration - включает режим движения с ускорением, числовое значение поля это величина ускорения движения.
Deceleration - величина замедления движения.
Steps per turn - определяет для контроллера количество шагов для совершения мотором одного полного оборота. Параметр устанавливается пользователем.
Microstep mode - режим деления шага. Доступно 9 режимов: от целого шага до 1/256 шага. Описание режимов в разделе Поддерживаемые типы двигателей.
5.3.1.3. Настройки обратной связи¶
В качестве датчика обратной связи для шаговых двигателей может использоваться энкодер. Для шаговых двигателей доступно три режима обратной связи.
None - без обратной связи. Движение осуществляется в шагах.
Encoder - режим задания движения в величинах отсчета энкодера. При включении данной опции доступен выбор типа энкодера: недифференциальный, дифференциальный или автоматическое определение.
Encoder mediated - в этом случае движение осуществляется за несколько итераций с контролем положения по завершению каждой итерации по энкодеру.
Encoder counts per turn - параметр определяет количество импульсов энкодера на один полный оборот оси мотора.
Encoder reverse - реверс энкодера.