5.3.12. Настройка кинематики движения (DC мотор)¶
В окне настроек программы Device -> DC Motor
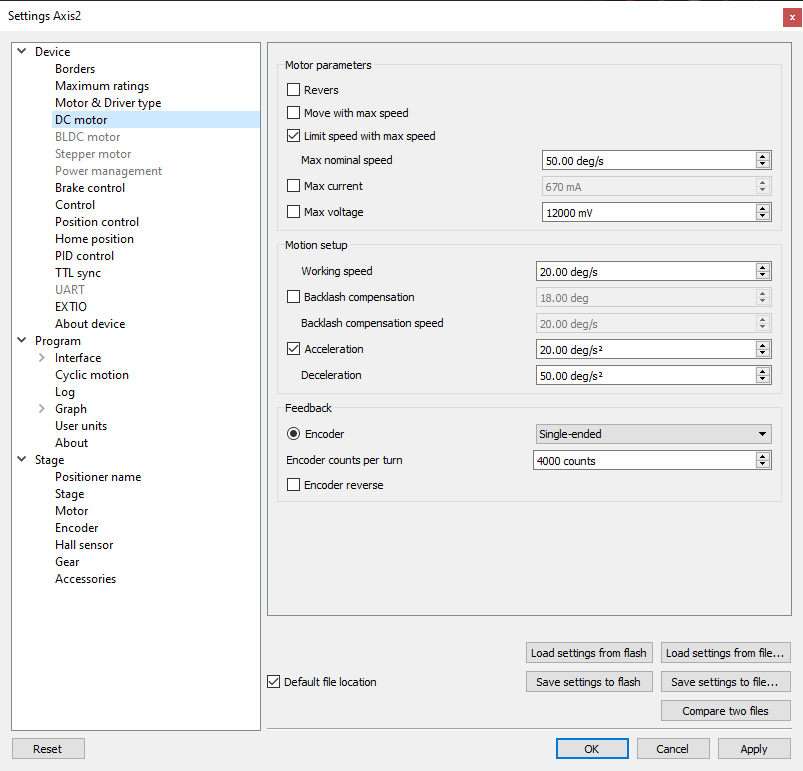
Окно настроек кинематики движения
5.3.12.1. Motor parameters - настройки электромотора¶
Revers - установка этого флага позволяет связать направление вращения мотора с направлением счета текущей позиции. Измените состояние флага, если положительное вращение мотора уменьшает счетчик позиции. Действие этого флага равносильно подключению обмотки мотора в обратной полярности.
Move with max speed - при установленном флаге мотор игнорирует заданную скорость и вращается с максимальной допустимой скоростью.
Limit speed with max speed - при установленном флаге контроллер ограничивает максимальную скорость по количеству оборотов в секунду значением поля Max nominal speed.
Max nominal speed, Max voltage, Max current - номинальные параметры мотора. Если они активны и применимы для данного типа двигателя, то контроллер ограничивает эти параметры в заданных рамках. Например, если скорость и напряжение на моторе превысили номинальные, контроллер будет снижать выходное воздействие, пока оба значения не будут в пределах нормы. Однако при этом контроллер останется в рабочем состоянии, будет выполнять текущую задачу.
5.3.12.3. Настройки обратной связи¶
Encoder - использование энкодера в качестве датчика обратной связи. При включении данной опции доступен выбор типа энкодера: недифференциальный, дифференциальный или автоматическое определение.
Encoder counts per turn - количество импульсов энкодера на один полный оборот оси мотора.