4.3.3. Концевые выключатели¶
4.3.3.1. Задача концевых выключателей¶
Задача концевых выключателей - предотвратить выход позиционера за допустимые физические границы его перемещения или ограничить диапазон перемещения в соответствии с требованиями пользователя. Неправильная настройка концевых выключателей может привести к заклиниванию позиционера, если контроллер выйдет за границы допустимого диапазона.
Отличие механических и оптических концевых выключателей.
В этом видео наглядно показано, как механические и оптические переключатели влияют на точность и как «уплывает» позиция при повторении калибровки в программном обеспечении XILab.
4.3.3.2. Общие настройки¶
Если концевик считается активным, то в структуре состояния выставляется соответствующий флаг, а на главном окне XiLab выводится соответствующий значок (левый или правый). Контроллер способен останавливать любое движение в сторону обоих активных концевых выключателей (левого и правого), только одного (левого или правого) или не ограничивать движение. Настройка концевиков может быть выполнена в XILab (см. Настройка диапазона движения и концевых выключателей).
4.3.3.3. Программное ограничение диапазона движения¶
Если аппаратных ограничителей на диапазон движения нет, а позиционер требует такого ограничения, то можно использовать программные ограничители. Для этого концевики переводятся в режим ограничения по отсчётам позиции (см. Настройка диапазона движения и концевых выключателей).
Предупреждение
Программное ограничение диапазона работает надежно только, если не происходит непосредственного задания новой позиции командами ZERO или SPOS, нет потери шагов или неисправности энкодера, при его использовании для позиционирования, а также не происходит частой потери питания во время движения. Если возникла одна из таких проблем, то программный диапазон надо перенастроить. Автоматически это можно сделать если есть подходящий опорный датчик с помощью автоматической калибровки нулевой позиции.
4.3.3.4. Аппаратные концевые выключатели¶
Контроллер может работать с концевыми выключателями на базе сухих контактов, оптопар, герконов и датчиками любых других типов, способных выдавать электрический сигнал «логическая единица» стандарта TTL 5 В в одном состоянии и «логический нуль» в другом. Причем каждый концевик может быть сконфигурирован независимо. Также есть возможность программно менять местами концевые выключатели и изменять их полярность.
Примечание
Концевые выключатели также удобно использовать для автоматической калибровки нулевой позиции.
4.3.3.5. Подключение концевых выключателей¶
Концевые выключатели подключаются к выводам в разъеме DSub. Ниже приведены типовые схемы подключения:
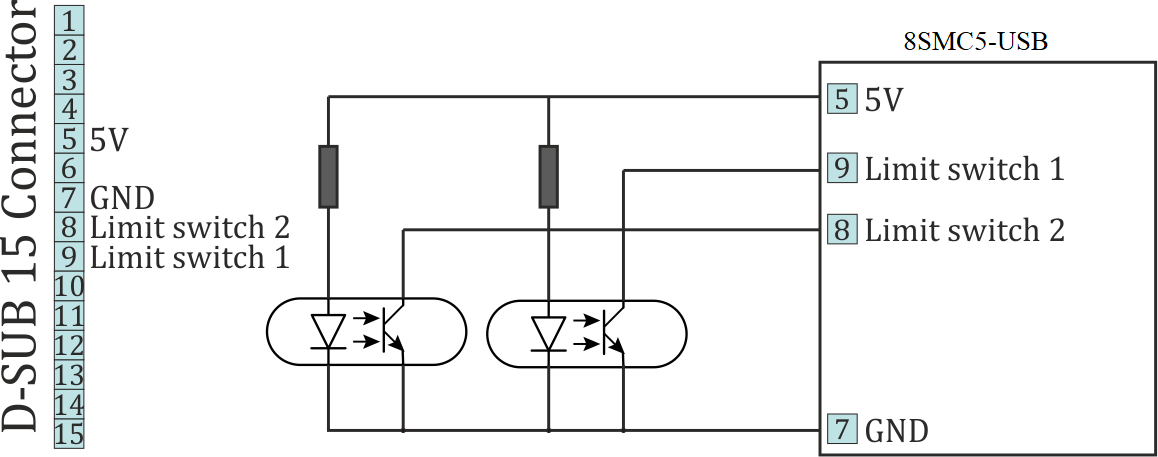
Подключение концевиков типа «оптопара»
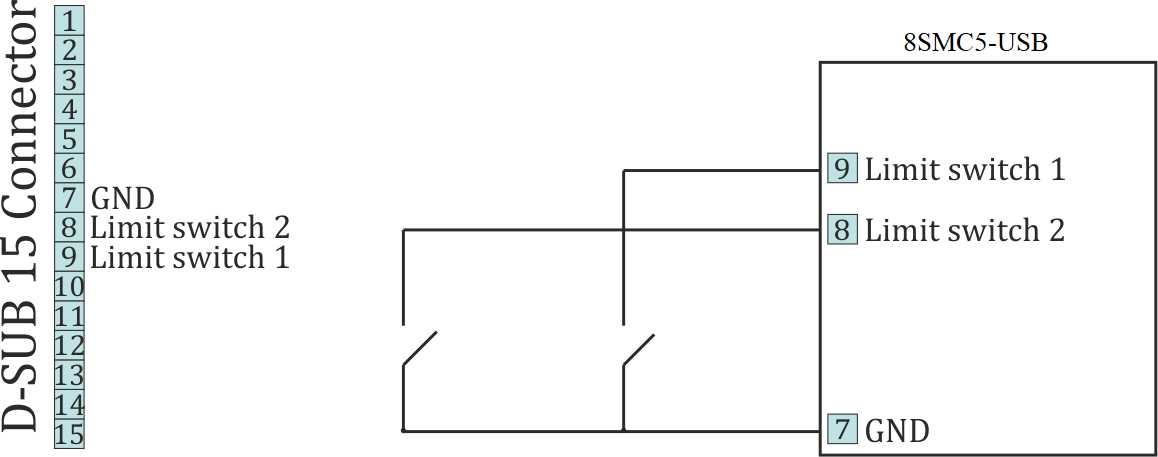
Подключение концевиков типа «сухой контакт»
4.3.3.6. Расположение концевых выключателей на трансляторах¶
Контроллеру необходимо указать какой из концевых выключателей будет левым, а какой - правым. Иногда это заранее неизвестно, а известно лишь, что оба концевика подключены и срабатывают каждый по достижении своей границы перемещения. Если неправильно настроить концевики, то позиционер может заклинить. Поэтому контроллер поддерживает простую функцию обнаружения неверно настроенных концевиков, останавливаясь по обоим из них. Убедитесь, что оба концевика не активны, их полярность настроена правильно и включена остановка по обоим концевикам. Включите флаг обнаружения неправильного подключения концевиков в соответствующем меню XiLab. Начните движение в любую сторону до остановки движения по концевику. Если движение было вправо, а левый концевик стал активным, или наоборот, то нужно поменять концевики местами (см. Настройка диапазона движения и концевых выключателей). При обнаружении неверного срабатывания концевика контроллер может перейти в режим Alarm, если включена соответствующая настройка в меню критических параметров .
Предупреждение
Защита от перепутанных концевиков не гарантирует, что о проблеме перепутанности можно забыть. Она лишь облегчает первоначальную настройку. Нельзя, в частности, начинать движение если какой-либо концевик активен, даже при включенной функции защиты.