4.3.12. Использование таблицы коррекции координат для более точного позиционирования¶
Если используется подвижка без линейного энкодера, то точное положение не всегда будет соответствовать показаниям координат по осям. Это связано с точностью изготовления механических деталей, люфтами, температурным расширением. В этом случае для более точного позиционирования можно воспользоваться корректирующей таблицей.
Важно
Таблица является индивидуальной для каждой подвижки. Таблица формируется производителем на высокоточном стенде.
Принцип работы:
Через определенные расстояния, не обязательно равные, начиная с 0 промеряется реальное положение подвижки. Разность между заданным и реальным положением заносится в таблицу. По полученным значениям, с использованием линейной интерполяции, производится пересчет координат при использовании определенных _calb функций. В результате, компенсируются неточности изготовления и другие возможные отклонения положения.
Пример: Предположим для позиционера задана следующая корректирующая таблица.
| X | 0 | 5 | 10 | 15 | 20 | 25 |
| dX | 0 | 0.05 | 0.02 | -0.003 | 0.01 | -0.04 |
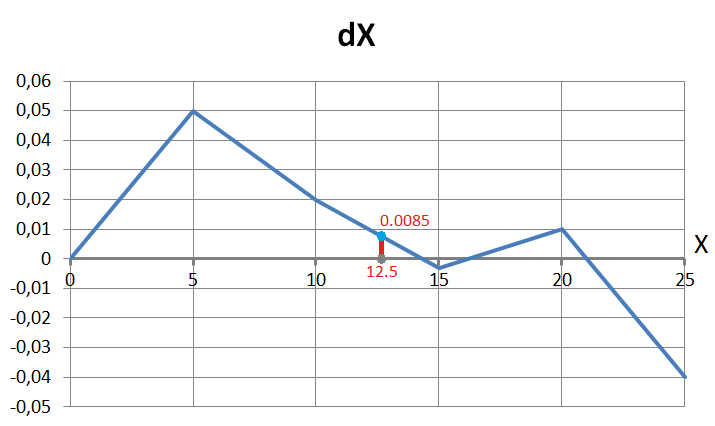
На графике показаны отклонения координат соответствующие таблице
Для перемещения в позицию 12.5 необходимо задать координату на 0.0085 большую то есть 12.5085. Это именно то, что делают алгоритмы некоторых _calb команд, которые используют таблицу коррекции координат.
В XiLab загрузить и очистить корректирующую таблицу можно на вкладке Настройки отображения пользовательских единиц.
Для просмотра списка функций, структур и параметров, которые корректируются при использовании корректирующей таблицы, смотрите руководство по библиотеке libximc.