4.5.2. Работа с магнитным тормозом¶
На разъеме BPC есть вывод для управления магнитным тормозом, установленным на ось шагового двигателя. Магнитный тормоз используется для удержания положения мотора при отсутствии питания.
4.5.2.1. Описание работы¶
Магнитный тормоз состоит из магнита и пружины, осуществляющей остановку оси мотора. При отсутствии напряжения на магните пружина зажимает ось в текущем состоянии, что позволяет сохранять необходимое положение мотора. После подачи напряжения на магнит, пружина освобождает ось.
4.5.2.1.1. Последовательность работы контроллера при отключении подвижки.¶
Остановка мотора (время остановки запоминается в контроллере) -> Отключение магнита от питания, фиксация вала -> Отключение питания платы
При включении подвижки последовательность работы контроллера обратная.
Поскольку любое движение инерционно, для управления магнитным тормозом и процессом фиксации положения устанавливаются следующие параметры:
- Время между включением питания мотора и отжатием тормоза (мс)
- Время между отжатием тормоза и готовностью к движению (мс)
- Время между включением питания мотора и зажатием тормоза (мс)
- Время между зажатием тормоза и отключением питания мотора (мс)
При отключении функции магнитного тормоза контроллер непрерывно подаёт сигнал отжатия тормоза. Это позволяет двигать мотор, оснащённый магнитным тормозом, не используя фиксацию ротора при остановках. При отключении функции обесточивания обмоток контроллер отрабатывает только задержки между переключением тормоза и началом/остановкой движения.
Все настройки магнитного тормоза можно изменять онлайн и тормоз будет переключаться в такой режим, который был бы если бы настройка всегда имела новое значение. Например, значительное увеличение задержки срабатывания тормоза, когда тормоз уже сработал, приведёт к тому, что тормоз снова будет отведён и по достижению новой задержки от момента остановки снова сработает. Так же можно отключать и включать сам магнитный тормоз или функцию запитывания обмоток.
| Тип | ТТЛ |
| Тормоз отжат | 3.3 В |
| Тормоз зажат | 0 В |
| Рабочий ток | не более 4 мА |
Настройка магнитного тормоза в программе XILab описана в Настройка тормоза.
4.5.2.2. Схема подключения магнитного тормоза¶
Для того, чтобы использовать магнитный тормоз, необходимо, чтобы система с контроллером была оборудована специальной платой-преобразователем. Модели, отвечающие этому требованию, можно опознать по буквам BR в названии, например 8SMC5-USB-B8-1BR.
Контакт, отвечающий за управление магнитным тормозом в коробочных версиях контроллера, расположен на 26 пиновом D-SUB разъеме. Схема подключения для двух разных систем указана ниже.

Схема подключения магнитного тормоза к одноосной системе
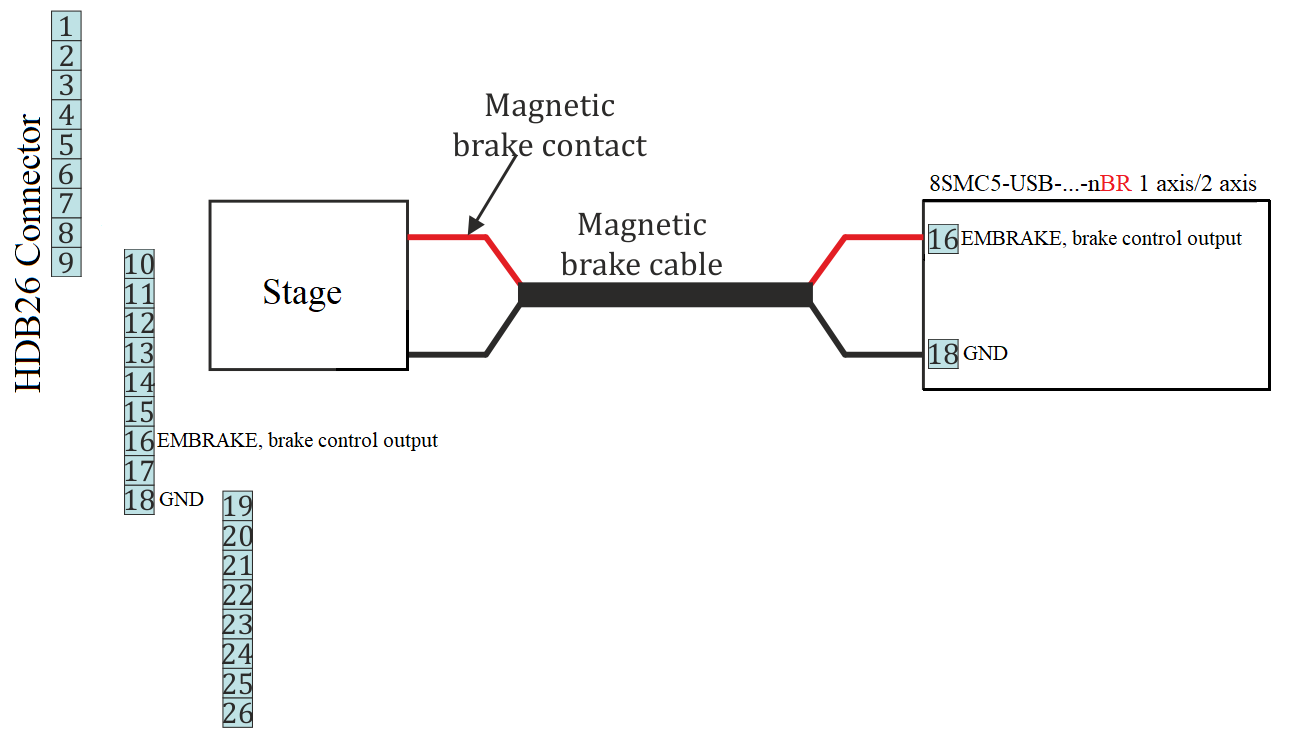
Схема подключения магнитного тормоза к двухосной системе
Важно
Гарантируется, что магнитный тормоз будет работать от Power supply PS36-4.4-4